|
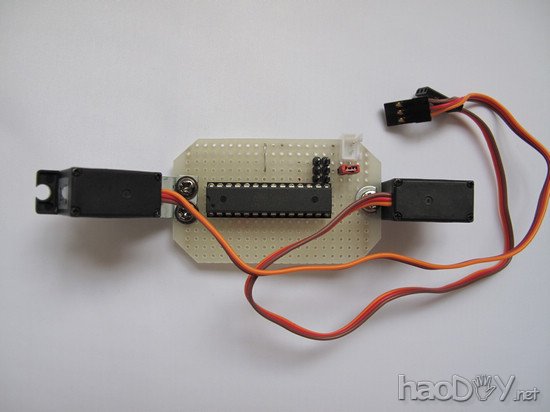
数字电路的特点是结构简单而原理复杂,模拟电路的特点是结构复杂而原理简单。这只数字爬虫的电子部分充分体现出了这个特点,从线路图和准备的元件可以看出,数字爬虫的电子部分除了一片AVR M8单片机和一块锂电池,剩下的就是一些接插件了,不需要任何额外的阻容元件及有源元件。因为元件极少,电路板的焊接也超简单,其实就是给单片机供电,再引出两组IO口用来连接爬虫头尾的两只舵机就可以。但是要让M8正常运转,按照表1的思路来控制这两只舵机做相应的动作,还需要编程下载等一系列后续工作。 电子部分直接焊接在爬虫身体的洞洞板上。M8单片机需要使用一个28孔插座,因为在调试爬虫的时候,可能需要反复拆下M8给它编程序。当然也可以给这只爬虫做做加法,把ISP插座焊在这块洞洞板上,还可以加上复位电路,再把单片机的IO口和AD口引出几组插针出来用于安装传感器。我这里只是搭建了一个M8的最简系统,以元件最小化为标准。
图十九,在爬虫身体上焊接好电子部分 (责任编辑:admin) |