|
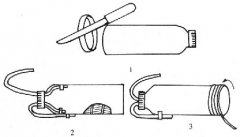
这两只机器人的骨架构造均采用Andrew Miller设计的BEAM爬虫,它是一只使用一前一后两只电机驱动的四足爬虫,见图一。图一中没有展示机器人的前后腿,更多的细节详见下文制作过程及爬虫机器人实物照片。
图一
爬虫机器人是步行机器人的一种,有着传统轮式机器人无法比拟的优点,比如攀登斜坡,跨越障碍,自由移动等。但是步行机器人的制作难度也一下子提高了许多,这使得许多机器人爱好者感觉无从下手。从图一的结构图中可以看出,Miller的这个经典设计有效地降低了步行机器人的制作门槛,它的机械部分元件较少,对工艺的要求也不太高,比较容易制作成功。即便如此,步行机器人的制作仍然是一项实践性非常强的工作,很难做到一次满意,需要在实践中反复积累经验。笔者可是制作了5~6只这样的爬虫以后才摸着点门道,之前做的那些不是重心不稳,走几步就摔倒;就是腿部形状有缺陷,机器人走不成直线。 步行机器人属于仿生机器人的一类,它们之所以难以实现理想的运行效果,主要原因是受到动平衡和静平衡的制约。动物在行走时,总是不停地调整自身的平衡点以保证不跌倒,这称之为动平衡;对机器人来说,它的控制器必须不断的将机器人的平衡状态反馈回来,然后机器人不停地改变加速度或者重心点来满足平衡的要求。静平衡则需要机器人的物理形制与步态之间相互协调,保证机器人在行走时不会发生偏离平衡点的现象;在机器人静止时,为了保证静平衡,还需要考虑机器人脚部的规划。 观察一下身边小猫小狗这些四足小动物的运动方式,注意看它们的四肢是如何连贯起来运动的,对理解Miller爬虫会有很大帮助。爬虫的头部电机与地面呈30度夹角,通过这只电机带动两只前腿向前抬起,伸展,着地。尾部电机的输出轴与地面垂直,使两只后腿推动机器人前进。这种步行运动的方式的关键在于如何调整四条腿之间的运动,这就需要在机器人的电控部分好好动动脑筋了。 表1和表2分别提供了两种双电机四足爬虫机器人的控制思路。 表1
表2
|