|
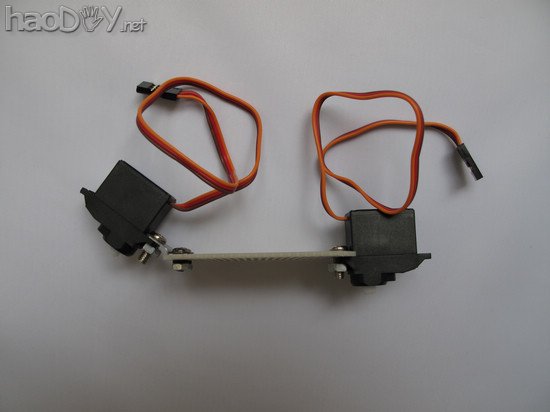
图五,身体装上舵机的侧视图,左侧为机器人头部。尾部舵机的输出轴与地面垂直,可以在身体后部打一个安装孔,用螺丝把舵机直接固定在上面。
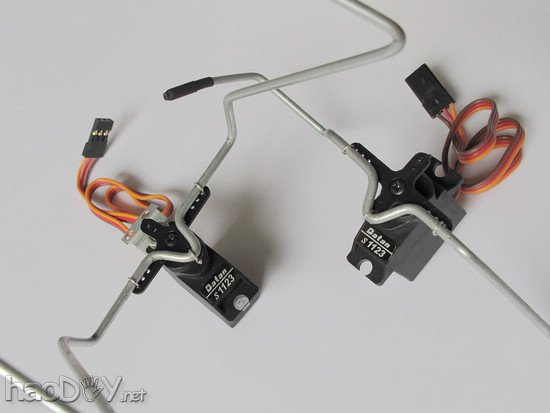
图六,用车条弯制机器人腿部,足部套上热缩管,以增加摩擦力,防止爬虫在光滑的地面上行走时打滑甚至摔倒。左图为左右前腿组合,由头部舵机驱动;右图为左右后腿组合,由尾部舵机驱动。
图七,车条与舵臂的连接示意,使用金属丝把车条捆绑在舵臂的小孔上。拆卸和替换非常方便。
图八,把做好的腿部与舵机连接上看看,腿部与舵机应该配合灵活,输出轴在运转范围内没有阻碍。 这只数字爬虫重量很轻,对舵机没有特别要求,可以选用任意品牌的9克微型舵机,比如威盛(TOWERPRO)的SG90。市场上可以买到两种SG90舵机,一种零售价在13元左右,透明蓝色外壳,引线颜色是黑、白、红,输出扭矩较小;一种22元左右的SG90,引线颜色是棕、红、桔,扭矩较大,它们都适用于这只爬虫。我使用的是一对质量稍好一些的北田(BATAN)S1123微型舵机。 舵机的优点是安装和替换非常方便,这方面生产厂家已经做足了功课,每款舵机均设计有通用的安装孔,配套的舵臂、舵盘也几乎都是标准件,减速箱也一并集成在舵机里面了。借助安装孔可以很方便的把头尾两只舵机安装在爬虫的身体上。使用洞洞板作为爬虫的身体,电子部分也是直接在洞洞板上进行焊接。舵机的另一大优点是内置了电机驱动电路,用单片机的IO口可以直接控制舵机,不再需要额外的驱动电路,这就从很大程度上简化了机器人的整体结构。 爬虫的腿部使用车条弯制而成,前后腿的形制没有严格的要求。根据大多数DIY爱好者的制作经验,四足着地的位置与爬虫身体中轴对称是第一要素,腿部形状是第二要素,此外还要兼顾美观。 2,模拟爬虫骨架的制作过程。 (责任编辑:admin) |