|
数字PK模拟 对比基于不同控制理念的两只爬虫机器人
作者:臧海波 日期:2011年7月26日
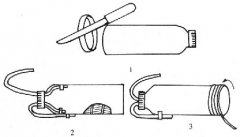
题图
题图照片展示了我近期制作的两只仿生爬虫机器人,左侧的爬虫为AVR ATMEGA8单片机控制两只舵机运转的模式,右侧为BEAM神经元网络控制两只减速电机运转的模式。
一,简介 在数字计算机大行其道的今天,几乎所有的机电一体化设备均采用数字(程序)控制的方式,小到玩具模型,大到生活生产设备,单片机和电脑都被广泛的应用着。与早期模拟控制方式相比,数字控制方式有很多得天独厚的优点,例如控制精确度高、升级方便、一致性好、性能稳定、维护方便等等。但是不可否认,模拟控制也许多无法取代的优点。本文就将站在一个客观的角度,回归自然和传统,去挖掘人类早已拥有的聪明才智,对模拟和数字控制理念进行回顾。通过两只简易爬虫机器人的制作,对比它们的运行效果,来比较这两种控制方式的优劣。 既然是PK,首要的前提应该是双方胜算均等,这样才会有更多的悬念。我制定了如下的目标: 1,制作两只四足爬虫机器人,使用数控和模控两种截然不同的控制方式,实现它们的爬行前进。 2,简化问题,不去考虑爬虫机器人的倒退、拐弯、避障等额外功能。 3,每只爬虫的制作成本控制在60元以下。实际上每只爬虫控制核心的电子部分,造价均低于15元。 4,爬虫的机械部分使用完全相同的材料来制作,成品形制尽量相同。 5,使用相同规格的3.7V 1200MAH锂电池做为电源。 6,成品重量均控制在60克以下。 7,在实现上述目标的前提下,把两只机器人做的艺术一点。 从构思这个题目,到收集材料,再到着手实现这两只爬虫机器人,我对它们最终的PK结果也充满了好奇。作为一名DIY爱好者,可以完全按照自己的喜好来设计规则,这也是手工制作引人入胜的地方吧! 二,结构与控制方法 (责任编辑:admin) |