|
近日心血来潮用Makeblock的零件搭了个自动爬楼梯的小车 废话少说先上视频 下面给大家介绍一下如何搭建这个案例。由于是自动爬行,那么自然有各种传感器。什么巡线(当接触开关用),超声波,限位开关,陀螺仪~~
[attach]182671[/attach] 首先先简单介绍一下实现原理 额。。理想状态下一共有8个阶段,其中1号轮子和4号轮子都是带电机的主动轮,其他都是从动轮,而且升降装置装在2号和4号轮子上 阶段1 前进
阶段2 超声波检测到前方有障碍(这里指的是楼梯) 车体上升,1号和2号升降装置把1号和3号轮子升起来直到超声波传感器检测不到楼梯
阶段3 1号和4号轮子推动小车前进
阶段4 2号轮子的巡线传感器检测碰到楼梯了,1号升降装置把2号轮子收回去
阶段5 1号和4号轮子推动小车前进
阶段6 4号轮子上的限位开关检测到4号轮子已经碰到楼梯,主动轮停止转动,2号升降装置把4号轮子收回去
阶段7 1号轮子推动小车前进 也就是阶段1
阶段8 也就是阶段2,小车继续前进直到超声波检测到楼梯然后开始循环
额。。攀爬原理差不多就是这样了,接下来给大家介绍一下搭建方法以及调试过程中碰到的一些问题 这个案例在机械结构方面的一个特色就是这个升降的装置,既要可靠,又要比较迅速地升降。所以我选择了齿条齿轮的配合方式,并且使用单孔梁作为滑轨,用3*3的同步带固定片配合双孔梁做了个简易滑块。 下面是搭建使用的材料和方法。 升降装置1  双孔梁032*4 双孔梁160*2 M4*22螺丝*8 M4螺母*8   然后使用下面的材料把上面搭好的结构连接起来  3*3同步带固定片*4 M4*8螺丝*16   额。。这样滑块就搭好了  拿两根0808*312的单孔梁刚好能穿过滑块 接下来我们来搭齿条 由于我们这个自动爬楼梯小车比较智能,能够适应不同高度的楼梯,所以我们的滑轨和齿条都要准备的长一点,既然滑轨都有312mm那么长了,齿条肯定不能短  所以我使用了4段齿条拼接起来,至于为什么上面的材料图片中有一根312的单孔梁呢,这是有原因的。光靠齿条拼接的话在升降过程中齿条与齿条之间的连接处会弯,这一弯齿轮和齿条的啮合就出问题了,哒哒哒滑齿了。至于为什么我会发现这个问题呢,这个就不解释了,说多了都是泪。所以我们要把齿条固定在这根单孔梁上。如下    接下来把导轨和齿条固定在一起 材料如下 144双孔梁*1 M4*22螺丝*3 M4螺母*2  176双孔梁*2 M4*22螺丝*6 M4螺母*6   装上2号轮子(从动轮) 使用以下材料  轮胎*2 90T同步带轮*2 螺丝轴*2 法兰轴承*4 M4螺母*2 M3*5无头螺丝*2 4*2塑料垫片*4   把轮子固定在双控梁的端面  2号轮子和1号升降装置搭建完毕 接下来搭建4号轮子和2号升降装置 2号升降装置结构和1号一样 所需材料也一样 只不过把032双孔梁固定在下图的位置  导轨和齿条的搭建与1号升降装置一样 上端的连接使用080双孔梁替代144双孔梁   128双孔梁*1 M4*22螺丝*6 M4螺母*6  装上L形支架,用 M4*14螺丝*2 M4螺母*2 固定在梁上   完成2号升降装置的搭建后就可以开始搭建4号轮子(主动轮) 所需材料如下  25mm电机*1 90T同步带轮 25mm电机支架 传动固定盘 M3*5螺丝 M4*14螺丝  套上轮胎,用 M4*14螺丝*2 螺母*2 固定在L形支架上  完成1、2号升降装置和2、4号轮子搭建,整车结构就完成一半了  接下来开始搭建主车架、1号和3号轮子 首先,把1号轮子(主动轮)搭建好 轮胎*2 90T同步带轮*2 传动固定盘*2 M4*14螺丝*8 M4螺母*4 M3*5螺丝*4 M3*5无头螺丝*2 25mm电机*2 25mm电机支架*2 064双孔梁*2   搭建前防撞杠  160双孔梁*1 L形支架*2 M4*14螺丝*4 M4螺母*4  搭建主车架  192双孔梁*2 防撞杠*1 前轮*2 M4*30螺丝*6 M4螺母*6  搭建3号轮子(从动轮)  轮胎*2 90T同步带轮*2 088单孔梁*2 法兰轴承*4 螺纹轴*2 4*2塑料垫片*4 螺母*2 M3*5无头螺丝*2  使用 M4*22螺丝*4 M4螺母*4  把3号轮子固定在车架上   装上2号升降装置  使用M4*14螺丝*8   装上1号升降装置 使用M4*14螺丝*6    由于楼梯宽度有限,轮子又比较大所以只能把轮子错开安装,为了节约搭建时间和材料,4号轮组之用了一个电机和一个轮子 再安装升级装置的电机  37电机(装好电机支架)*2 18T齿轮*2 M3*5无头螺丝*2 M4*8螺丝*4 调整好齿轮和齿条的距离分别固定在1号、2号升降装置双孔梁的螺纹槽上     完成机械搭建 接下来开始安装传感器 限位开关*1  装在2号升降装置侧面  限位开关*2  分别装在1号2号升降装置的梁上。(作用:限制抬升高度)   安装电机驱动   安装巡线传感器  M4*22螺丝 4*10塑料圆柱 4*2塑料垫片*4 巡线传感器*1  安装陀螺仪  安装超声波传感器   由于超声波模块没办法检测0-30mm的距离,所以放里面去了 让防撞杆去撞楼梯,小车撞上障碍后刚好是30mm多点,顺利检测到(这都是调试后才发现的~_~!!)  安装主控板    安装适配器(限位开关用)   额。。基本上传感器安装好了,现在介绍一下各个整车结构和传感器  整车从左到右可以按轮子分成4个部分,其中1号轮子和4号轮子是主动轮(驱动轮),2号和3号轮子是从动轮  其中1号和2号升降装置控制2号和4号轮子的位置     这里加装陀螺仪是因为我们升降装置用的是直流电机,没办法保证车体平衡,所以加入陀螺仪调整电机抬升速度 整车图 接线图 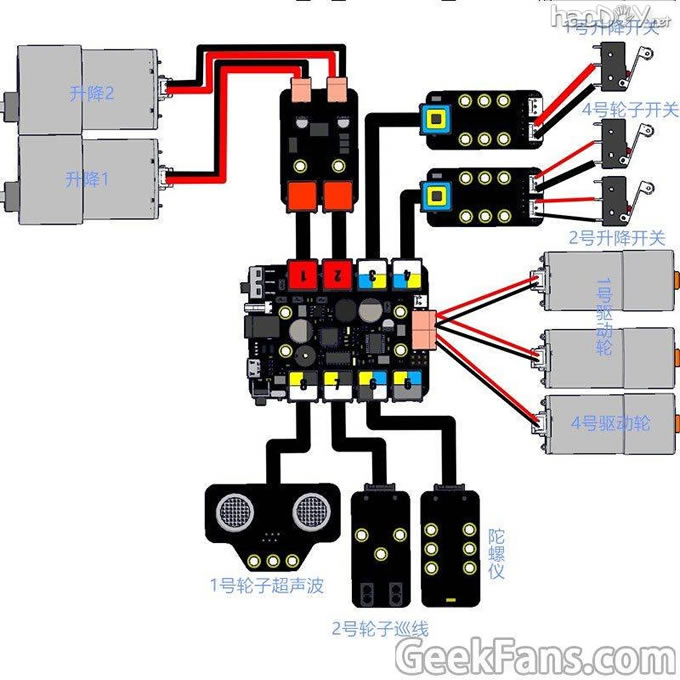 代码如下:#include "MeOrion.h" #include <Wire.h> MeGyro gyro; MeDCMotor lifer1(PORT_1); //升降1 MeDCMotor lifer2(PORT_2); //升降2 MeDCMotor rw(M2); //1号驱动轮 MeDCMotor fw(M1); //4号驱动轮 MeLineFollower lineFinder1(PORT_7); // 巡线 MeLimitSwitch upWard1(PORT_3, SLOT2); // 1号升降限位开关 MeLimitSwitch forWard2(PORT_4, SLOT1); // 4号轮子限位开关 MeLimitSwitch upWard2(PORT_4, SLOT2); // 2号升降限位开关 MeUltrasonicSensor ultraSensor(PORT_8); // 1号轮子超声波 void setup() // 初始化,前后升降装置回收 { Serial.begin(9600); gyro.begin(); lifer1.run(-250); while (!upWard1.touched()); lifer1.stop(); lifer2.run(-250); while (!upWard2.touched()); lifer2.stop(); } void Step2() { float p = 15; float i = 0.01; float angle = 0; float targetAngle = 0; float integration = 0; float err = 0; while (NotStop()) { gyro.update(); float angle = gyro.getAngleX(); err = angle - targetAngle; integration += err; int speed1 = 200; int speed2 = 200; speed2 = speed1 + err * p;// + integration * i; lifer1.run(speed1); lifer2.run(speed2); //delay(10); } lifer1.stop(); lifer2.stop(); } int startTiming = 0; unsigned long startTime = 0; int NotStop() { int16_t distance; distance = ultraSensor.distanceCm(); delay(10); if (0 == startTiming) { if ((distance < 10) && (distance > 1)) { return 1; } else { startTiming = 1; startTime = millis(); return 1; } } else { unsigned long currentTime = millis(); if (currentTime - startTime < 2500) //超声波检测不到楼梯后延时2.5秒 { return 1; } else { return 0; } } } void loop() { startTiming = 0; startTime = 0; //阶段1 小车前进 fw.run(60); rw.run(60); //1号 4号轮子推动小车前进 int16_t distance; do { distance = ultraSensor.distanceCm(); delay(10); } //阶段2 碰到楼梯 主动轮停止 整体车架上升 while (!((distance < 4) && (distance > 1))); //如果碰到楼梯 fw.stop(); rw.stop(); Step2(); //阶段3 1号 4号轮子推动小车前进 fw.run(60); rw.run(60); //阶段4 2号轮子巡线传感器检测到楼梯 主动轮停止 升降装置1把2号轮子收回去 while (!(lineFinder1.readSensors() != S1_IN_S2_IN)); lifer1.run(-250); fw.stop(); rw.stop(); while (!upWard1.touched()); //1号升降限位开关检测升降结束 lifer1.stop(); Adjust(); //阶段5 1号 4号轮子推动小车前进 fw.run(60); rw.run(60); //阶段6 4号轮子限位开关检测到4号轮子碰到楼梯 主动轮停止 2号升降装置回收4号轮子 while (!forWard2.touched()); lifer2.run(-250); fw.stop(); rw.stop(); while (!upWard2.touched()); //1号升降限位开关检测升降结束 lifer2.stop(); //阶段7 循环阶段1 //阶段8 循环阶段2 } void Adjust() //陀螺仪控制1、2号升降电机控制平衡 { int p = 40; //float i = 0.05; float angle = 0; float targetAngle = 4; //float integration = 0; //float err = 0; do { gyro.update(); angle = gyro.getAngleX(); //err = (angle - targetAngle); //integration += err; lifer2.run((angle - targetAngle) * p);// + i * integration); //delay(10); } while(fabs(angle - targetAngle) > 1); lifer2.stop(); } (责任编辑:admin) |