|
会画画的智能小车,你有没有想过自己也做一个这样的机器人小车呢? 第一步:组件准备绘图机器人涉及到许多不同的运动控制单元,以下是你所需要的组件清单:
电子组件: Adafruit Pro Trinket 3V(也可以使用Arduino) 2个Geared 5V步进电机 ULN2803达林顿驱动器 面包板 16个母口对母口跳线 微型伺服电机 母口引脚头 2个2 x AA电池盒 USB线 4颗AA电池
结构件: 2个7/8" ID x 3/16'O型圈 5/8"脚轮轴承 10颗M3 x8毫米盘头螺钉 4颗M3×6平头螺丝 12颗M3螺母 3D打印组件: 滚珠轴承脚轮(文件) 机箱(文件) 2个车轮(文件) 2个步进电机支架(文件) 伺服电机支架(文件) 套圈(文件) 第二步:配置开发坏境并写入固件
配置开发坏境:驱动下载安装和相关配置方法点击链接见Adafruit的网站。 将固件TIRL_Trinket_TEST.ino写入到Trinket板中,另外值得一提的是,该固件和Arduino也是兼容的。 第三步:硬件拼装虽然理论上只要各个部件按照适当顺序连起来就能用,但是要保证绘图机器人写出的东西和计划的一样,还是应该要对各个组件的安装位置保持关注。 安装电池壳
拼装轮子
安装步进电机
安装脚轮
接下来就要安装电子控制部件了,这里有很多线要接,不要看花眼了!
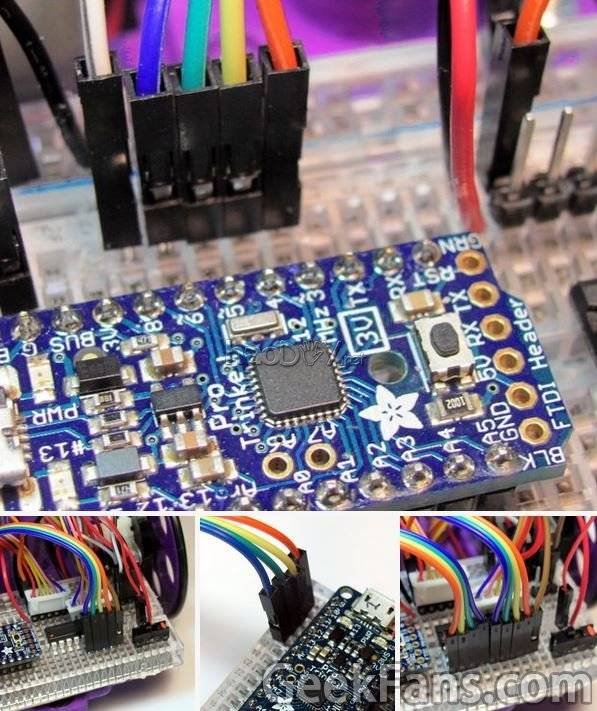
首先将微控制器、达林顿去东区和开关安装到面包板上。按图所示进行连接,连接好之后装上电池并打开开关,可以看到板上的LED灯开始发光。 安装接线头并连接电机。
装上画笔,笔的位置调整可以通过手动完成,也可以在软件上进行调整: int PEN_DOWN = 170; // angle of servo when pen is down int PEN_UP = 80; // angle of servo when pen is up
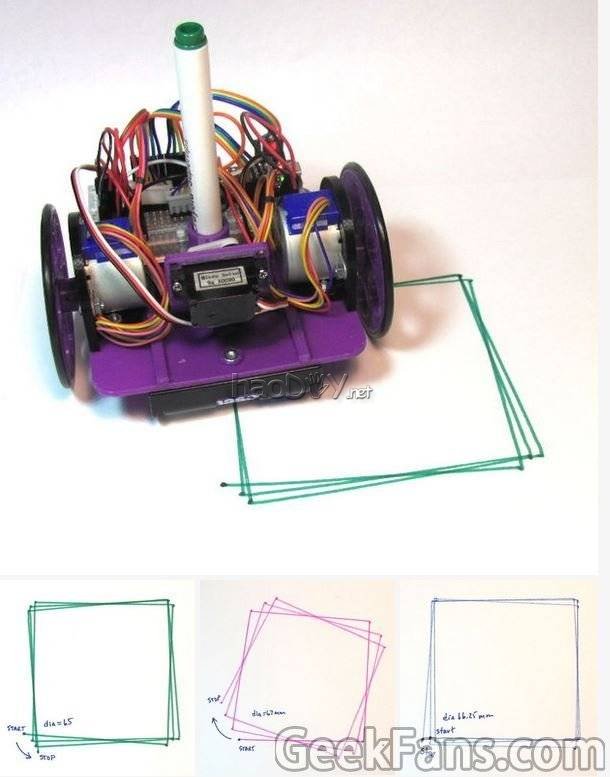
安装好了之后就可以进行测试了。以上的测试固件TIRL_Trinket_TEST.ino只能画出一个正方形,但这已经足够用来检测机器人的平衡了。 测试完成后就开始表演吧!画一朵玫瑰花: 其它平台事实上,利用其它开发平台(Arduino或树莓派)也能打造出类似的绘图小车,该创客就基于不同的平台打造了不同的版本。
基于Arduino的绘图小车
基于树莓派的的绘图小车 (责任编辑:admin) |