|
在完成上一个以简单电学电路为基础的避障机器人项目后,我们将进行第三个PVC机器人项目制作。这是一个比较特殊的机器人,首先其控制电路比上一个项目稍微复杂了一点,是以电子元器件组成的;其次这个机器人不再以传统电池作为电源,而是采用了绿色环保的太阳能作为能源;另外,这个项目的动力驱动方式比较特别——以震动的方式进行挪动位移。 本项目主要面向对电子电路有点陌生的初学者,能够让大家初步掌握以电子元器件为基础的电子制作,了解基础的电子知识,理解简单的电路原理,同时掌握基本的电路焊接技巧。如果是对此已经非常熟悉的朋友,可以跳过本章节。
这是一个的以太阳能为能源的特殊移动机器人,即以太阳能电池为电源,以偏心摆锤马达的震动效果作为挪动的动力。 以下为效果视频,前一段是在灯光(白炽灯)下进行测试的效果,后面一段为在阳光下的效果。 因为体型相象,以及震动时的嗡嗡声,我给本项目的太阳能动力机器人再起一个外号——晒太阳的蚊子,呵呵。 本项目套件的淘宝地址:http://item.taobao.com/item.htm?id=9284864243 一、基本原理 1.1、驱动原理 1.2、机械结构 1.3、电路原理 1.3.1、电路符号 1.3.2、电子元件 (电阻、电容、二极管、三级管、震动马达、太阳能电池) 1.3.3、原理分析(常规分析、类比分析) 二、准备工作 三、制作过程 3.1、电路焊接 3.2、电路测试 3.3、结构制作 3.4、安装电路板 3.5、震动马达 3.6、太阳能电池 3.7、电源开关 3.8、整机组装 3.9、整机效果 3.10、结构完善 四、效果展示 五、常见问题 六、项目总结 一、基本原理 本项目的太阳能机器人采用太阳能电池作为电源,依靠带偏心摆锤的震动马达发出的震动波进行移动。
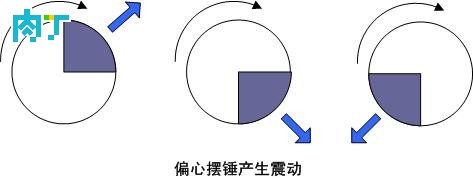
1、驱动原理 本项目机器人的动力来自于震动马达,这和我们的0号机器人的驱动原理是一样的,具体可以参见这里:PVCRobot 0号机器人驱动原理 这里所谓震动马达,其实就是我们手机中实现震机的震动器,其原理就是通过旋转的马达带动一个位于偏心轮上的摆锤,由于摆锤的重心是位于旋转的轴上的一边,在马达转动的过程中,就会由于摆锤的重量不断循环的在转轴的周围产生一个离心的外力(即:交替忽上忽下、忽左忽右的摆动),从而导致马达的震动。
下图中左边的两个震动马达是在普通马达上接了偏心摆锤,而右边扁平的其实把马达和摆锤融为一体了,效果其实相当于左边马达竖着放而已,只不过结构更紧凑了。
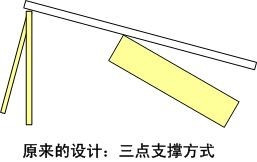
2、机械结构 本项目机器人的结构最开始在设计的时候是采用“三点支撑”的方式,即:一对前脚,然后尾部(电子元件:电解电容)着地。
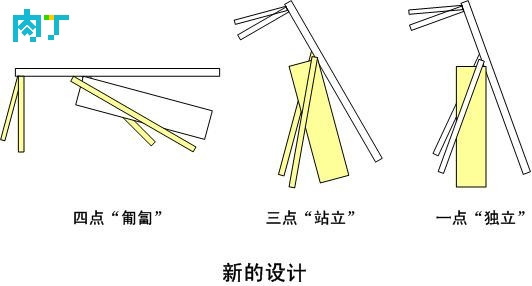
后来在实际测试的时候,发现由于尾部着地点较远,导致重心比较靠中心,从而整体平衡较稳定,在震动的时候挪动的幅度不够。后来的设计改为再增加两只后腿,既可以采用三种支撑方式: 1)“四点支撑”:四脚匍匐,较稳定,移动幅度小; 2)“三点支撑”:后脚站立,较稳定,移动幅度较大; 3)“一点支撑”:尾部独立着地,很不稳定,移动幅度最大。 在上面的视频中也演示了这三种不同的情况。 也就是加了两只后腿,看起来就像蚊子了,本机器人“蚊子”的外号也因此而得名。
在重量一定的情况下,越是不稳定的结构,在震动的影响下移动的幅度越大。不过由于震动采用的器件是带摆锤的马达,在震动的过程中会有一个旋转的趋势,如果采用不稳定的支撑结构时,容易发生原地转动。 要改变这个情况,则可以:调整震动马达的安装方位 如果把震动马达从现在平行身体(一字型)的方向改为垂直身体(十字型)的方向安装,则旋转的趋势就会变成向前或者向后的动力,震动时机器人就会由“打转”变为“向前”或“向后”移动。 如果要改变前进或者是后退,则只要改变马达的电源正负极,即改变马达是顺时针还是逆时针旋转;如果震动马达的摆锤位置不是正好位于机器人身体的中心轴,则还会有略微的转动,但这样动起来的效果更好,还带一点转弯。
另外,这里提一下,如果改用扁平震动器,则不可避免的一定会出现以上所说的打转的状况,因为扁平震动器其实相当于上面那种震动马达以转轴垂直地面的竖着放的情况,而扁平震动器由于形状所限又不能随意调整安装方位(只能扁平的水平贴在物件的表面),即无法像上面所说情况那样通过改变方位去化解转动的趋势。当然,如果专门追求转动的效果那又是另外的一种思路。 3、电路原理 本项目的电路比起上一个项目的简单电学电路来说复杂了一些,除了特殊的太阳能电池、震动马达之外,还有几个包括电阻、电容、二极管、三级管等在内的电子元件。
对于熟悉电子电路的朋友,看了这个电路图一定觉得很简单。如果没有接触过电子电路的朋友也没有关系,接下来我会仔细进行讲解,有兴趣的朋友可以听我慢慢说来,如果是已经了解的朋友请直接跳过下面的一段。当然,可能也有一些朋友说“电路原理我就不深究了,反正我会照着电路图组装就行”——这当然也是可以的(以前我自己在初学无线电的时候就是这样的^_^)。 下面我将用简单通俗的比喻进行讲解,有一些比喻未必非常恰当,但有助于理解一些抽象和生涩的内容。1)电路符号 我们先要会看电路图,下图把各个符号所对应的电子元件都做了注明。
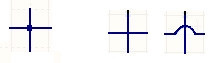
此外,除了了解每种符号对应的代表什么电子元件之外,我们也要懂得基本电路连接的表达方式。特别是对于交叉线的表示方式: a)下图左边的一组交叉线,中间有一个圆点,代表横、竖两条线路是互相连接的; b)下图右边的两组交叉线,一组中间是没有圆点,另一组有一个圆弧(似乎像跨过去一样),两组都是代表一样的意思——即横、竖条线路是互相不连接的。 2)电子元件 我们再来了解本项目电路中所涉及到的几种电子元件。
(1)电阻 电阻的作用可以理解为减小电流。 下图两个符号都是电阻的电子符号。
如果把电流比喻成水流的话,电阻可以看成一个“把大水管的水流转到小水管中流动的装置(水流减小器)”,比较大的水流经过该设备后变成了比较小的水流。 本项目中采用的电阻的阻值为:2.2K。
(2)电容 电容的作用可以理解为存储电流(实为电荷)。 电容有两个引脚,一般分为两种,一种是不分极性的普通电容;另一种是两个引脚区分正负极性的称为电解电容(简称:电解),其正极性的引脚一定要接在电源的正极,负极性的引脚一定要接在电源的负极上。
下面电子符号中,左边一个的为普通的电容,右边的两个都是电解电容(两种不同的表示方式,带加号或者空心的一边为正极)。
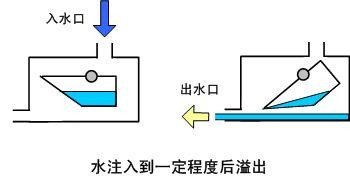
如果把电流比喻成水流的话,电容可以看成一个“蓄水装置”,而电解电容则是一个“限定了水流方向的蓄水池”,蓄水池中有一个特殊的倒梯形容器,往蓄水池中注水,当水达到一定程度后,由于重力平衡的问题,倒梯形容器会一次性把水全部倒出,水则从另一个出口溢出来。 电容的基本参数称为“容值”,可以理解为能够存储多少的水,即:容值越大,能够存储越多的水(或者说需要注入越多的水才能注满,水才能从另外的出口流出)。 电容“容值”的数值单位: a)基本单位为:法拉(符号:F,较少用); b)小一点的单位为:毫法(符号:mF,较少用); c)再小一点的单位为:微法(符号:μF,常用); d)更小一点的单位为:皮法 (符号:pF,常用); e)最小的单位为:纳法(符号:nF,较少用)。 其换算关系为: 1F=1,000mF=1,000,000μF=1,000,000,000pF=1,000,000,000,000nF 1μF=1,000pF 本项目中采用的电解电容的容值为:4700μF。(3)二极管 二极管有两个引脚(因此得名),基本作用可以理解为仅允许某一个极性的电流通过。而在本项目中采用的LED发光二极管,除此功能之外还可以发光。 二极管的两个引脚是区分正负极性的,只有正极性的电流才能从二极管的正极引脚单向通过,或者说只有负极性的电流才能从二极管的负极引脚单向通过。
二极管的电子符号,喇叭口的一端为为正极。下图中左边一个的为普通的二极管,右边的两个都是发光二极管(两种不同的表示方法,都带表示发光效果的箭头)。
如果把电流比喻成水流的话,二极管可以看成一个“限定了水流方向的可以根据水压自动控制的阀门”,当水流的压力达到一定程度后,水流会顶开阀门允许水流通过,但是同时水流不会往入水口倒灌(入水口位置高于出水口,实现单向流动;用专业的比喻就是一种称为“逆止阀”能够控制水不会倒流的阀门)。 |






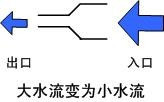 注:实际上不能简单通过大水管接小水管的方式就能把水流变小,那样只会让水流更急更快,以上的比喻只是希望通过忽略其他因素简化表述。 电阻的基本参数称为“阻值”,可以理解为能够把大水流变成多细的水流的程度,即:阻值越大,能够转换的水流就越细。 电阻“阻值”的数值单位: a)基本单位为:欧姆(符号:Ω); b)大一点的单位为:千欧姆(符号:KΩ,简称K); c)更大一点的单位为:兆欧姆(符号:MΩ,简称M)。 其换算关系为:1MΩ=1,000KΩ=1,000,000Ω
注:实际上不能简单通过大水管接小水管的方式就能把水流变小,那样只会让水流更急更快,以上的比喻只是希望通过忽略其他因素简化表述。 电阻的基本参数称为“阻值”,可以理解为能够把大水流变成多细的水流的程度,即:阻值越大,能够转换的水流就越细。 电阻“阻值”的数值单位: a)基本单位为:欧姆(符号:Ω); b)大一点的单位为:千欧姆(符号:KΩ,简称K); c)更大一点的单位为:兆欧姆(符号:MΩ,简称M)。 其换算关系为:1MΩ=1,000KΩ=1,000,000Ω
 本项目中二极管的作用就是一个阀门的功能,阀门要打开需要一定的条件,这可以理解为水量够多达到一定的水压时,阀门打开允许水流通过。 二极管“打开阀门”,实际上就是所谓的“导通”,即二极管两端的电压达到一个下限值时二极管就导通允许电流通过。一般普通的硅材料的二极管的导通电压为0.7V(伏特),而本项目我们采用的LED发光二极管的导通电压为2V(伏特)左右,也就是说当达到2V(伏特)左右时LED发光二极管导通,同时发出亮光。 本项目之所以采用LED发光二极管,是因为我们希望设置一个导通条件为2V左右的阀门。如果要采用一般的硅材料的非发光二极管,因为其导通电压条件比较低,要整体导通条件达到2V的话,我们就需要把三个普通的二极管串联在一起(每个导通电压0.7,三个就是2.1V)。即三个普通的硅二极管串联可以代替一个LED发光二极管,当然为了简单且减少元件的数量,我们建议还是采用LED发光二级管。 这里要提醒一下,本项目建议采用红色发红光的LED发光二极管,这种二极管相对来说导通电压比较低,而其他颜色的导通电压比较高(接近甚至达到3V,绿色发绿光、黄色发黄光的相对都比较高,而白色发其他颜色光的最高),否则可能会影响效果——即影响阀门的灵敏度,可能导致阀门很难被打开。
(责任编辑:admin)
本项目中二极管的作用就是一个阀门的功能,阀门要打开需要一定的条件,这可以理解为水量够多达到一定的水压时,阀门打开允许水流通过。 二极管“打开阀门”,实际上就是所谓的“导通”,即二极管两端的电压达到一个下限值时二极管就导通允许电流通过。一般普通的硅材料的二极管的导通电压为0.7V(伏特),而本项目我们采用的LED发光二极管的导通电压为2V(伏特)左右,也就是说当达到2V(伏特)左右时LED发光二极管导通,同时发出亮光。 本项目之所以采用LED发光二极管,是因为我们希望设置一个导通条件为2V左右的阀门。如果要采用一般的硅材料的非发光二极管,因为其导通电压条件比较低,要整体导通条件达到2V的话,我们就需要把三个普通的二极管串联在一起(每个导通电压0.7,三个就是2.1V)。即三个普通的硅二极管串联可以代替一个LED发光二极管,当然为了简单且减少元件的数量,我们建议还是采用LED发光二级管。 这里要提醒一下,本项目建议采用红色发红光的LED发光二极管,这种二极管相对来说导通电压比较低,而其他颜色的导通电压比较高(接近甚至达到3V,绿色发绿光、黄色发黄光的相对都比较高,而白色发其他颜色光的最高),否则可能会影响效果——即影响阀门的灵敏度,可能导致阀门很难被打开。
(责任编辑:admin)


![[普及贴] 作为科技迷,你必须要了解的乐高机器人常识!](/uploads/allimg/171105/1_110521222H234.jpg)



















