
4)电解电容 最后我们焊接电解电容。 根据“电路板正面布局图”在电路板上插入电解电容(引脚不要留得过短,不要让元件太过贴着电路板)。
电解电容的引脚是区分正负极性的,通常其外皮上会印刷有“”减号,对应代表负极性的那只引脚。
我们把电解电容按照正确的引脚插好,然后就按照“电路板底面布局图”焊接电解电容(紫色部分为连接线)。
最后,就完成了所有电子元件的电路板焊接。
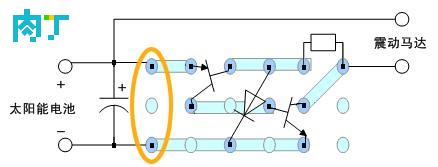
3.2、电路测试 焊接好电路板之后,我们需要对电路进行测试,看看电路是否能够正常运行。 我们先把两片太阳能电池用电线串联起来,如下图:左边电池的正极接右边电池的负极(短黑线),则左边电池的正极就作为串联后的正极输出(长红线),右边电池的负极就作为串联后的负极输出(长黑线)。
按照“电路板底面布局图”接好马达和太阳能电池。
特别注意,本项目的太阳能机器人一般只能在太阳下才能运行,而在普通灯光下由于亮度不足将无法正常运行。如果要在室内测试太阳能机器人,由于光线不足就需要借助特别的灯光——可以选择100瓦的白炽灯(在实体五金店中可以很容易买到灯泡和插座),以代替阳光。(注意:不能用一般日光灯或是节能灯,因为其亮度无法让太阳能电池有足够的输出功率)。
确认电路都调试好没有问题了,我们就可以把电路板按照实际用到的范围从整块电路板上进行裁切。当然如果是比较熟练的朋友,可以在焊接前就按照所需的尺寸先裁切好电路板。
以下是机器人电路板最终的样子。请注意电解电容不需要完全搭在板上,只是引脚部分连电路板上,即:靠近电解电容这一端的电路板不要预留过多,这样电解电容可以上下活动调整,因为电解电容是作为机器人腹部,有一端是贴住地面的,可以调整其角度以改变机器人地面支撑的角度。
3.3、结构制作
方块中间用小电钻(也可用锥子)打两个小孔(直径1mm左右,上螺丝用)。 3)前脚 剪一段PVC窄方条(6.5cm*0.5cm),在两边离前端大概1cm处开始剪成斜边,并在2.5cm和4cm处留好折痕。
4)腹板
用PVC剪一个方条并折成如下形状,作为腹板,并对照主干前段的两个小孔在腹板弯折处也打两个小孔。 尝试把电路板固定在上面,看看位置和尺寸是否合适。注意:腹板靠近电解电容这一端,与电路板对齐,允许电解电容上下调整位置。
5)待组装的部件 把主干、前脚、背板、腹板都对准位置,打好固定的小孔,其中: (1)主干前端、腹板弯折处、前脚,三处的一对小孔都是对应在一起的; (2)主干中部、背板,两处的一对小孔都是对应在一起的。 背板的两个小孔上1.2*5mm的螺丝,并且加上垫片。
3.4、安装电路板
2)背板 剪一块PVC方块(2.5cm*2cm)。 下面我们开始机器人机械结构的制作,按照机器人的不同部位进行组装。 1)主干 用剪刀裁一段PVC方条(6.5cm*1.5cm左右) (责任编辑:admin) |








 在白炽灯下,进行电路测试。 正常效果,马达会每隔几秒钟转动几下。调整白炽灯与太阳能电池板的距离,查看马达在光线不同时的效果——光线越亮,马达每两次转动的间隔就会越短,如果灯泡贴着太阳能电池板甚至马达会持续转动。
在白炽灯下,进行电路测试。 正常效果,马达会每隔几秒钟转动几下。调整白炽灯与太阳能电池板的距离,查看马达在光线不同时的效果——光线越亮,马达每两次转动的间隔就会越短,如果灯泡贴着太阳能电池板甚至马达会持续转动。

 然后再剪成如下形状,其中一端用小电钻(也可用锥子)打两个小孔(直径1mm左右,上螺丝用)。
然后再剪成如下形状,其中一端用小电钻(也可用锥子)打两个小孔(直径1mm左右,上螺丝用)。

 把窄方条用尖嘴钳折成如下样式。
把窄方条用尖嘴钳折成如下样式。





![[普及贴] 作为科技迷,你必须要了解的乐高机器人常识!](/uploads/allimg/171105/1_110521222H234.jpg)



















