|
(4)三极管 三极管有三个引脚(因此得名),在本项目中的基本作用可以理解当“控制引脚”的电压达到一定程度后把另外两个引脚连通从而允许电流通过。 三极管的两个引脚是不同的,其中“控制引脚”称为“基极”,用字母“B”表示;另外常连接着电源的,相当于引入电流的那一引脚称为“发射极”,用字母“E”表示;还有一个引脚是作为输出电流给目标的,称为“集电极”,用字母“C”表示。 三极管通常分为NPN和PNP两种类型(这里不做详细介绍,如果不明白的可以百度一下),简单的理解就是: a)NPN型的三极管,其“发射极”固定连接的是电源的负极,即实现的功能就是控制负极的电流从“集电极”输出; b)PNP型的三极管,其“发射极”固定连接的是电源的正极,即实现的功能就是控制正极的电流从“集电极”输出。 注:实际上电流没有正负极之分,电流都是从电源正极流向电源负极,上面这样提只是便于简化表述。
下图三极管的电子符号,左边的两个为NPN类型(有两种表示方法),右边的两个为PNP类型(有两种表示方法)。 NPN和PNP两者的符号区别只是发射极箭头的方向,NPN是箭头向外的,而PNP是箭头向内的,这个箭头其实就是电流的方向(电流实际上从电源正极流向负极的),正好也就是NPN型的发射极是接着电源负极,而PNP型的发射极是接着电源的正极的。
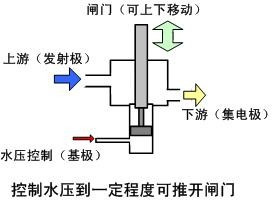
如果把电流比喻成水流的话,三极管可以看成一个“由注入的水的水压控制的水闸”,当从控制口注入的水的水压达到一定程度后,水闸会打开,水闸上游的水会流向下游。如果NPN型三极管说是“控制水是从东流向西的水闸”,则PNP型三极管就相当于“控制水从西流向东的水闸”。(姑且可以这样理解) 三极管有比较多的参数指标,这里不展开讲,有兴趣的可以自己百度一下。这里只提一个参数——“最大电流”,也就是说三极管最能够承受多大的电流通过,用我们水流的例子理解就是这个水闸单位时间里最大能够允许多大的水流通过(立方/秒)。我们这个电路由于采用的是太阳能电池供电,实际电路的电流并不大,所以我们选择三极管的时候就按照比设计电流稍微大一点的指标进行选型。
本项目采用两个三极管,一个是NPN的,型号为9014;一个是PNP的,型号为9015。 如果看过这个电路图原始版本的朋友可能会知道,他原来采用的两个三极管的型号为2N3904和2N3906,那两种三极管的最大电流是0.2A。其实这个影响不大,之所以我这里改为9014和9015是因为在我们国内,后面这两种型号的三极管相对容易找一些,而这两种型号的三极管最大电流虽然只是0.1A,但是对于我们这个电路来说还是足够了的。(5)震动马达 本项目的动力来自震动马达产生的震动波。关于震振动马达在前面的驱动原理的章节中已经有了详细的介绍,这不再重复。 马达的电子符号如下图(两种表示方法),圆圈里面的字母“M”其实就是英文单词“Motor”(译为:发动机、马达)的首字母。
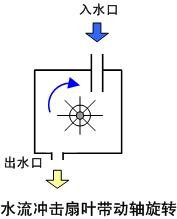
还是对于水流的例子,本项目的震动马达相当于一个“以水流驱动的水轮机(水车)”,水流从高处留下来,冲击扇叶,扇叶带动一根转轴转动,结果就是把水流落差的势能转为机械旋转的动能。 (6)太阳能电池 太阳能电池是本项目机器人的能量来源。 电池的电子符号如下图:
a)第一个和第二个为普通电池的符号。 □ 一根长线和一根短线为一组,长线的一段为正极,短线的一段为负极; □ 很多时候,一组长短线就代表一节电池,两组就代表两节电池; □ 也有些时候,多少组长短线并不代表具体多少节电池,尤其是在电压比较高时(如果真要换成多少节电池来表示可能需要非常多组的长短线,那样的话太复杂),而只是代表是电源,具体多少电压一般会在旁边直接注明,比如:3V、1.5V*2(意为两节1.5V的电池)。 b)第三个符号是电池旁边带了英文“Solar Cell”, 含义就是“太阳能电池” 。 c)第四个符号是电池旁边带了一组射入的箭头,代表光线,其实也指的是“太阳能电池” 。 太阳能电池是一种把光能转换为电能的器件。单片太阳能电池板的功率都不大,电压电流都不高,如果用多块太阳能电池板串联来可以提高电压,如果用多块太阳能电池板并联来可以提高电流,也可以是即串联又并联既提高电压也提高电流。即便如此,由于太阳能电池的效率并不高,所以一般不会直接用太阳能电池作为动力驱动,动力驱动用专门的大电流电池组,而太阳能电池只是用于给这些电池组进行充电(充电电流要求不高)。 本项目的机器人的移动方式决定了其不需要持续的电源供电,所以我们用可以用太阳能电池进行直接的动力驱动,中间通过一个巧妙的电能积蓄电路进行电能收集,达到一定的量之后进行瞬间短暂的放电以获取足够的电流。具体原理在后面的电路分析中会有详细的说明。
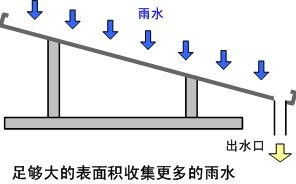
同样对于水流的例子,我们把太阳能电池看成是“可以收集雨水的装置(雨水收集器)”,即把晒太阳看成是淋雨(正好相反,哈哈),把“收集太阳能转为电能形成电流”看成是“收集雨水形成水流”。 本项目采用两片1.5V/50mA的太阳能电池板串联在一起使用。 3)原理分析 接下来我们对本项目的电路进行原理分析,有兴趣深入了解的朋友可以继续跟着来,如果已经很熟悉的可以跳过本节。
本项目机器人的电路实际上是一个比较巧妙的电路——脉动充放电控制电路,其可以把功率较低且有可能断断续续的太阳能电能收集起来集中存储,当存储的电能达到一定量的时候,通过瞬间短暂的放电以获取足够的电流去驱动马达。虽然瞬间放电的电流足够大能够驱动马达,但是持续时间很短,在积蓄的电能很快耗尽后,则马达停止电路重新开始收集太阳能进入下一次循环。 即是这样一个过程: 太阳能充电——>积累电能——>瞬间放电——>驱动马达——>耗尽电能——>太阳能充电…… 由以上看出,本项目的机器人运动的频率是有一个间断性的,即周期性一阵阵的挪动,阳光亮度越大,每个周期中间的间隔时间就越小,相当于挪动得更快。 (1)常规分析 下面我们将以常规的方式,即从电子专业的角度,对电路图的原理进行分析。 特别说明:以下的箭头并不一定代表电流方向,只是为了说明电路执行的流程,实际电流方向总是从正极流向负极。
a)太阳能电池把太阳能转换为电能,并给电解电容充电。
b)电解电容积蓄电能,过程中整体电路的电压逐步上升,当达到LED二极管的导通电压时(2V),LED二极管导通。
c)LED二极管导通后,可以给PNP三极管的基级提供足够的电压,促使PNP三极管导通。
d)PNP三极管导通后,反过来又给NPN三极管的基极提供足够电压,促使NPN三极管导通。
e)NPN三极管导通,一方面通过电阻给PNP三极管基极保持足够的导通电压,另一方面驱动马达转动。其中用电阻可以降低电流,以保护LED二极管以及PNP三极管不容易烧坏,而且也降低LED二极管的功耗(毕竟这里LED二极管的主要作用不是用来发光的),让更多的电能都用在驱动马达上。
f)马达启动后,会迅速消耗电解电容中存储的电能,整体电路的电压下降,直到无足够电压保持二极管的导通,则二极管截止。
g)由于NPN导通后会通过电阻分一定的电流给到PNP三极管的基极,使得即使二极管截止之后仍然有足够的电压在PNP三极管基极使其保持导通。
(2)类比分析 如果是原来没有电子基础的朋友,可能对前面常规方式的电路原理分析还是听得一头雾水,没有关系,下面我们将以通俗易懂的类比方式再进行一次分析。已经了解的朋友可以忽略跳过继续浏览后面的内容。 在之前介绍电子元件是都会类比到某一种容易明白的工具设备,其实那不仅仅是有助于了解电子元件,同时也是为下面用类比方式介绍电路原理做一个铺垫。
主要的流程如下: 1)下雨天气,“雨水收集器”收集雨水 2)收集到的雨水注入“蓄水池” 3)“蓄水池”蓄满水后会溢出,一次性倒出 4)水流顺着管道流向“阀门”和“水闸” 5)“阀门”和“水闸”关闭,水流无法继续向前流 6)水压升高,水流顶开“阀门”并通过“阀门”,水流到达“闸门1”的基极 7)水压升高,“闸门1”被顶开,水流从“闸门1”的发射极流向集电极 8)“闸门1”集电极流出的水流向“闸门2”的基极 9)水压升高,“闸门2”被顶开,水流从“闸门2”的发射极流向集电极 10)“闸门2”集电极流出的水流向“水车”,并且通过“水流减小器”流回“水闸1”的基极 (责任编辑:admin) |








![[普及贴] 作为科技迷,你必须要了解的乐高机器人常识!](/uploads/allimg/171105/1_110521222H234.jpg)



















