|
臧海波

题图 在制作了一系列单电机和双电机驱动的简易机器人以后,我开始试着制作稍微复杂一些的机器人。本文中的机器人,是一部由三只电机驱动的六足仿生昆虫机器人,电机增加了一只,难度一下子提高了好几倍。 一,仿生昆虫机器人 由三只电机驱动的步行机器人有两种常见的结构。 一种是著名的HEXAPOD,即昆虫机器人。在GOOGLE上搜索HEXAPOD可以找到很多机器人爱好者制作的风格各异的作品。我要制作的是一部简单的六足HEXAPOD,结构如图1所示。机器人的左前腿,左后腿及右前腿,右后腿通过拉杆连接,在左后和右后侧减速电机的驱动下做水平动作。左中腿和右中腿在腰部电机的驱动下做垂直动作。这部仿生昆虫机器人在爬行的时候,有着类似生物昆虫一样的步态,总是保持三足着地,即通常所说的Tripod Gait(三脚架步态)。三角架步态可以确保机器人在运动时重心的平稳,不会摔倒。
图1 仿生昆虫的步态规划非常的灵活,我给仿生昆虫机器人制定了两种步态方案,如下表1和表2(顺、逆、停为三只电机的状态,根据机械结构的不同,电机方向的不同,状态也不尽相同)。表1是我实际使用的步态。 表1
表2
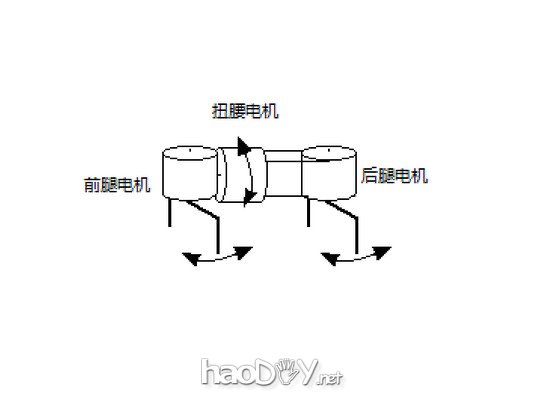
另一种是BEAM爬虫机器人,类似前一篇文章中所介绍的模拟爬虫,仍然是四足的结构。增加的一只电机安置在机器人的腰部,称为扭腰电机,用途是改善机器人的步态。结构见图2。
图2 二,制作昆虫机器人的骨架 所需材料:
图3 给机器人骨架准备的全部材料。铝棒的截面为3MM X 7MM,用来制作腿部,1MM厚的5052铝合金板用来制作主体。这次使用了三只高品质的减速电机,电压6V时,转速约为20RPM。
图4 首先是给铝棒打孔,加工机器人的腿部。固定电机的轴销需要打M1的通孔,连杆部分打M2.2的孔,为了减少误差,这部分工作需要使用台钻来完成。
图5 腿部的固定孔打好以后,就是考验技术的折弯工序了。使用台钳固定住有孔的那一侧,折弯时用力要慢,并注意铝棒拐角的部分要留出一定余量。
图6 制作好的左后腿和右后腿,这两条腿是靠电机直接驱动的,需要把电机的输出轴固定在它们上面。注意腿部和地面(尺子所示的水平线)需要预留好一定高度,防止电机底部蹭到地面。
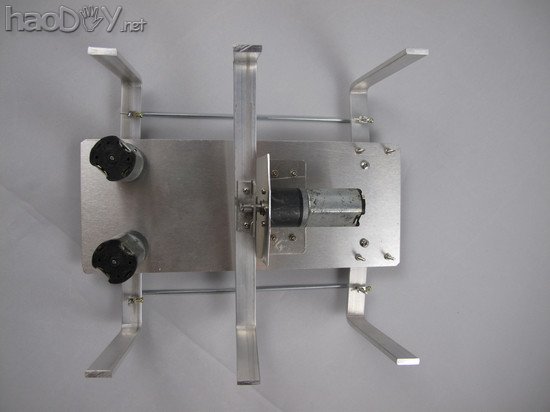
图7 用5052铝板制作好机器人的主体。图右下侧的L型材料用来固定机器人的腰部电机,机器人中间的两条腿,靠这只电机驱动。
图8 开始进行骨架的组装。注意,此时机器人中间的两条腿还没有加工出来,这个步骤先不急,下文会详细说明。 图9 首先是固定左后腿和右后腿。先把左后和右后两只减速电机与机器人主体固定好。使用曲别针弯成U字型框,替代作为轴销。
图10 左后腿固定孔特写,中间的大孔用来穿过电机输出轴,两个小孔用来穿过曲别针做的轴销。在打孔的时候我考虑到材料重复利用的问题,这三个孔间距也适用于固定标准舵机的摇臂或者舵盘,方便以后升级之用。此时右后腿已经固定在右后侧电机上,细节见上图。
图11 左前腿,右前腿为从动腿,它们将靠左后腿和右后腿的与之相连的连杆推拉进行运动。使用M3螺丝、垫片和锁紧螺母固定好这两只腿的轴孔,确保它们与机器人主体之间活动自如。
图12 测量好左前腿与左后腿,右前腿与右后腿之间的距离,用车条弯制一对倒U字型的连杆。把圆珠笔芯切成四小段,另外从压线端子排里面拆出四套铜芯待用。
图13 用车条连接好机器人的两侧的左前-左后,右前-右后四条腿。圆珠笔芯切成的小段,垫在车条与腿部的连接孔之间,减小摩擦。
图14 使用从端子排里面拆出的铜芯,以压接的方式,固定在车条的末端,防止连杆在运动的时候脱出。
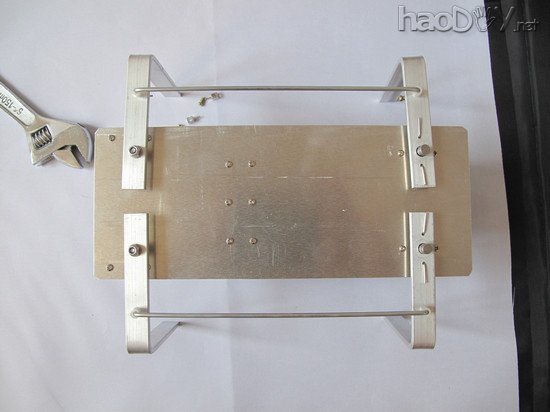
图15 机器人两侧连杆装配完毕的顶视图。喘一口气,看着这只已经完成了一多半的小怪兽,感觉还不错。
 。。。。。。 (责任编辑:admin) |








 #p#分页标题#e#
#p#分页标题#e#