|
蚂蚁机器人有很多种,最常见的是由一系列舵机构成的模拟蚂蚁外形和行动的多自由度机器人(有点类似六足),还有由一系列微型机器人构成的蚁群。本文介绍的是一种相对较易实现,造价也比较低的一对蚂蚁机器人,它们研究的是如何利用电路构造简单的神经网络指挥机器人的运动。
制作机器蚂蚁 第一次接触到神经网络这个词,是来自刘慈欣写的科幻小说《三体》。大刘在书中描述的神经网络和神经网络计算机引发了我极大的兴趣,尽管以为这是个梦幻的东西,但还是满怀好奇抱着试试看的心情上网搜索了一番,于是就有了下文这两只小机器人的诞生。 本文所说的神经网络指的是Mark Tilden提出的neural network和由此派生出来的BEAM机器人,虽然很可能“此神经”非“彼神经”,但是考虑到神经网络本身就是处于研究阶段的一门科学,而BEAM机器人的神经网络又是业余条件下少数几个可以实现的方案之一,也就没什么好抱怨的了。 基于上述神经网络的机器人,最经典的要数BEAMant了,字面上翻译过来就是机器蚂蚁。机器蚂蚁先后有过很多个版本,因为时间久远,一些早期的设计在网上已经找不到了。现在beam-wiki(一个权威的BEAM机器人网站)上提供的官方版本是Mark Tilden在1999年设计的BEAMant 6.0。 下面是我制作两只机器蚂蚁的过程和一些体会。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。 
  
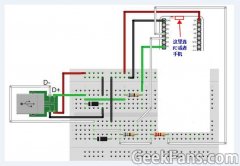
简化测试版:

B516ST
#p#分页标题#e#
CORE

规避障碍和绕行——返回原来的路线的机制。
(责任编辑:admin) |