|
看了各类关于呆板人的科幻片,你就没有想过本身做一个片中的呆板人出来么? 实干派的DIYer可不是只会理想的哟。PVC_Robot同窗就用了便宜又好加工的PVC原料来制作了他的第一个六足呆板昆虫,同时给出了很是具体的器材和原料得到方法。DIY党人要速率围观
呆板昆虫
制作时刻:数天至一周 制作难度:★★★★★ GEEK指数:★★★★★
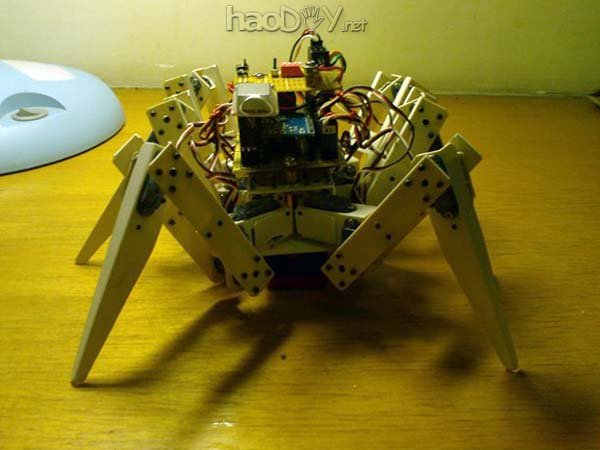
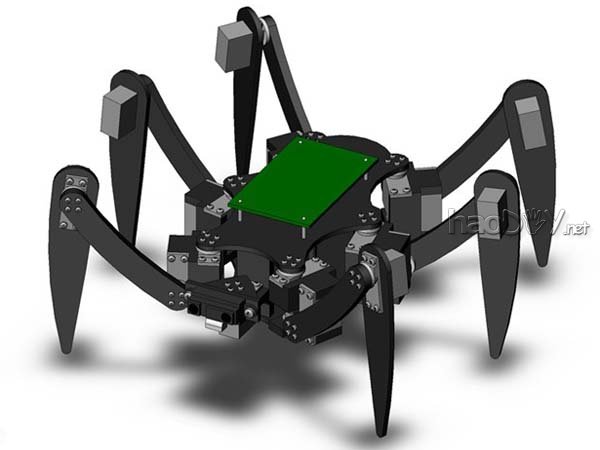
偶尔的机遇,在网上看到这张图片,于是本身也有激举措一只出来。 为了做出这个对象,自学了单片机,加上本身软件开拓的基本,以及已往做模子蕴蓄的一些下手履历,有了其后的这个呆板昆虫。 虽然最后现实出来的对象,样子上和此刻这个图片相去甚远,机能上也一样平常般,没步伐,业余的,程度有限嘛。
1 器材和原料
○ 枢纽和基本布局的制作原料——PVC线槽。 回收PVC线槽的缘故起因是取材轻易、价值自制,一样平常的五金店都有卖,并且便于加工、强度和重量都吻合。 ○ 其他原料,详见作者 小我私人博客 。 ● 在作者的 另一篇博文 里,有关于器材的具体先容。
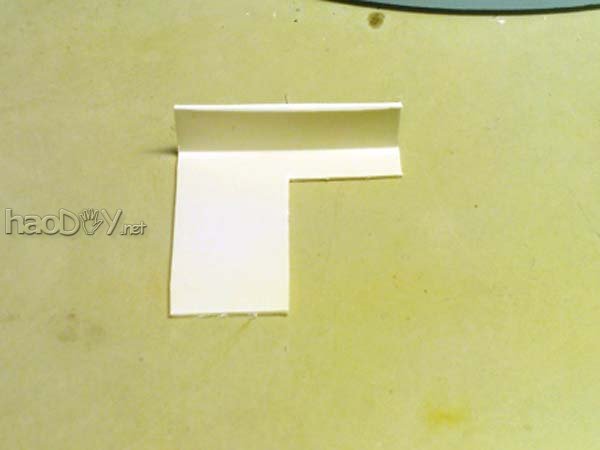
2 根基机器布局 2.1 原始加工件
● 把PVC线槽切成枢纽的外形。
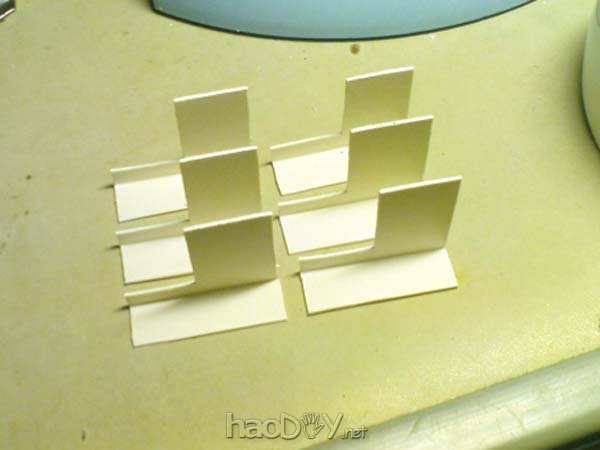
2.2 大腿横向枢纽
● 这是6只大腿的横向枢纽,弄好后才发明,所有都是一样。个中3只要重做,应该是两两对称的。
● 重做之后的6只枢纽。
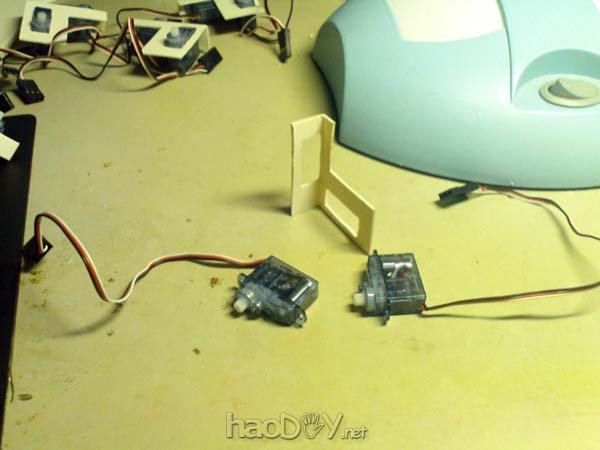
2.3 枢纽节制的舵机
● 思量尽也许的缩小体积,以是回收的是2.5g微型舵机,6只脚每只3个枢纽,总共18个枢纽,也就是18个舵机。(由于数目较量大,这个耗费照旧较量多的,有点心疼)。
关于 2.5g微型舵机
● 把舵机实行安装到枢纽件上。
2.4 完美枢纽件
● 进一步打磨修饰枢纽件。 ● 还可以看到PVC线槽上的标号(这个最后换掉了)。
● 完成后的6只大腿的横向枢纽件。
2.5 安装枢纽舵机
● 大腿横向枢纽上的舵机已经装好。个中一个舵机毗连主躯干,另一个毗连大腿的纵向枢纽。
2.6 安装主躯干
● 主躯干也是用PVC线槽做的,毗连上6只大腿横向枢纽。 ● 枢纽舵机与躯干是靠舵盘毗连的,舵盘是用自攻螺丝牢靠在躯干上。中间有一个洞是用来给自攻螺丝最后总装时牢靠嵌入的舵机主轴的。
● 来一个前景,看到一点加工的现场。 ● 为了更平稳,并减轻重量,每个舵盘的牢靠螺丝由2颗大号的自攻螺丝改为4颗1.2mm的带螺母的小机牙螺丝。 ● 其它,关于大腿纵向枢纽和小腿枢纽的图片,着实都差不多,只是外形有差异,可是因为中间忘了照相了,以是这里就省略掉了。
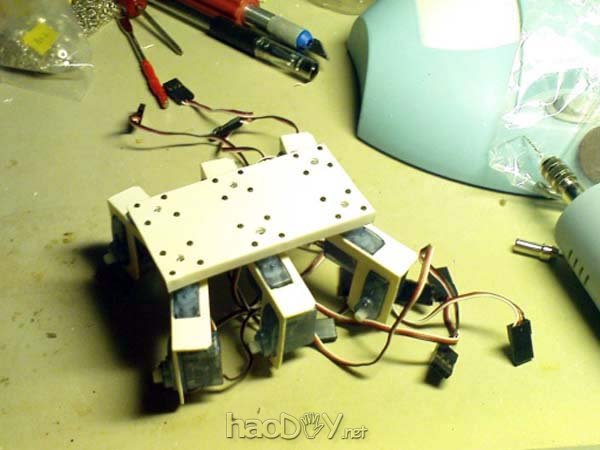
2.7 完备的机器布局
● 完备组装好的机器布局,有点样子了。 ● 主躯干、大腿横向枢纽、大腿纵向枢纽、小腿枢纽,都是PVC线槽做的。18个枢纽的舵机也所有装好。(换了一个LED配景灯光,照片有点重影) ● 原来躯干上牢靠舵机舵盘的螺丝都是螺母在下面的,可是由于选择的螺丝长了一点,往下装会影响底部舵机的旋转,以是改为螺母向上装,固然是看起来是丢脸一点。不外后头会在躯干上再装上电路板盖住一点,相对就好一些。
3 根基电路体系 3.1 节制电路
● 节制电路的焦点回收AVR单片机的MEGA16芯片,思量到体积,同时也想有点挑衅性,没有直接用现成舵机节制板,而是用焦点板筹备本身写舵机节制措施。
关于 M16焦点小板
3.2 电路调试
● 起源完成根基电路的安装,毗连电脑烧录措施,举办简朴的舵机节制的调试。 ● 确定舵机举措幅度所必要的PWM频率时,用到了 舵机测试器 ● 除了通过USBASP毗连电脑之外,电源也暂且是外接的电池组。
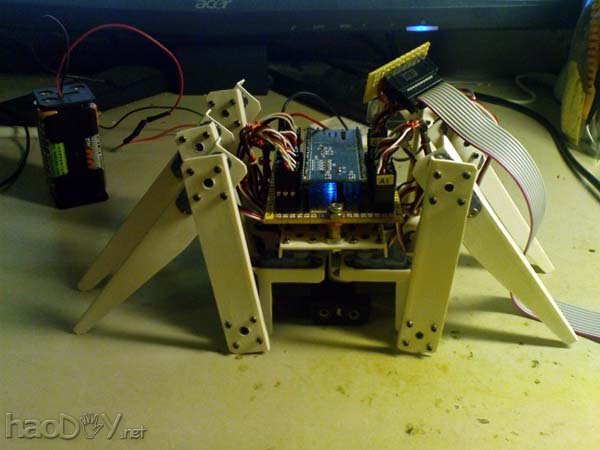
3.3 张牙舞爪
● 编好牢靠举措的措施,烧录到电路上,举办简朴的举措调试。 ● 来一个“张牙舞爪”的举措。 ● 很酷吧,不外肚子照旧趴在桌面上的(肚子下面是电池盒以及6只大腿横向枢纽)。
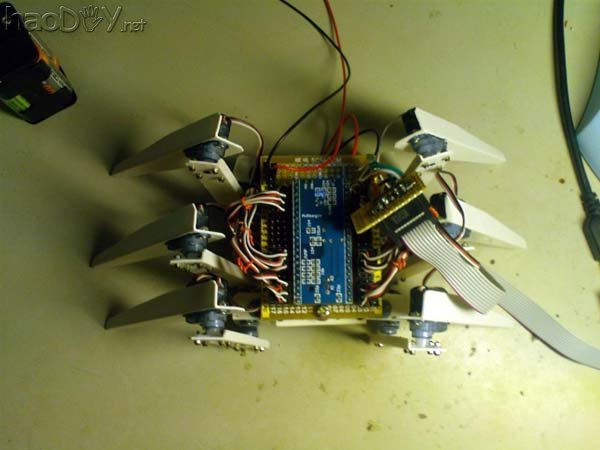
3.4 缩成一团
● 再来一个举措“缩成一团”。 ● 这个举措的名字起得不怎么样,照旧靠肚子顶住桌面的。
● 这是俯视图。
3.5 站起来了 (责任编辑:admin) |