|
看了各类关于呆板人的科幻片,你就没有想过本身做一个片中的呆板人出来么? 实干派的DIYer可不是只会理想的哟。PVC_Robot同窗就用了便宜又好加工的PVC原料来制作了他的第一个六足呆板昆虫,同时给出了很是具体的器材和原料得到方法。DIY党人要速率围观
呆板昆虫
制作时刻:数天至一周 制作难度:★★★★★ GEEK指数:★★★★★
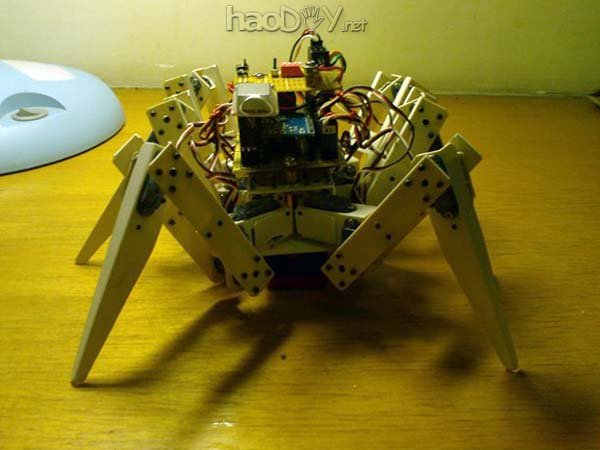
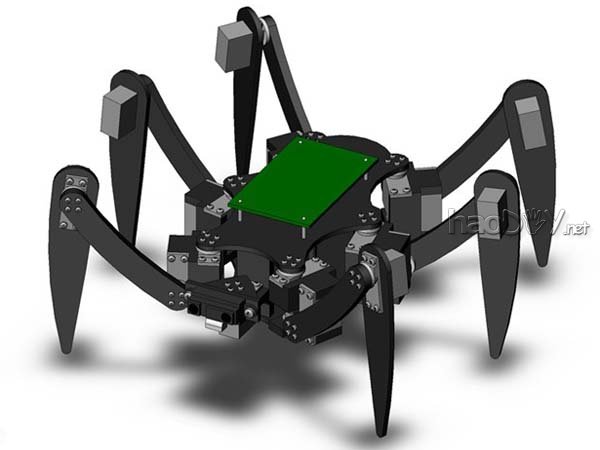
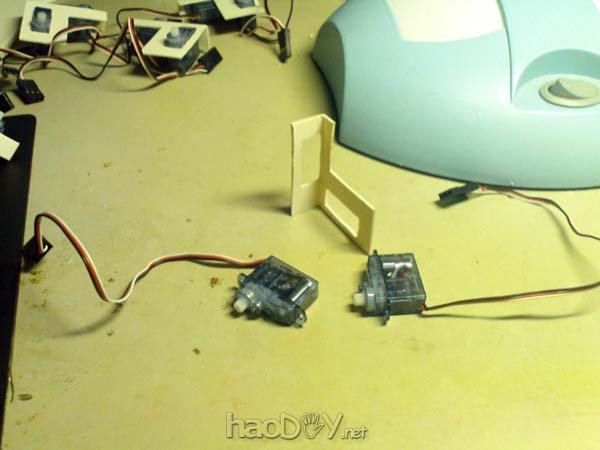
偶尔的机遇,在网上看到这张图片,于是本身也有激举措一只出来。 为了做出这个对象,自学了单片机,加上本身软件开拓的基本,以及已往做模子蕴蓄的一些下手履历,有了其后的这个呆板昆虫。 虽然最后现实出来的对象,样子上和此刻这个图片相去甚远,机能上也一样平常般,没步伐,业余的,程度有限嘛。
1 器材和原料
○ 枢纽和基本布局的制作原料——PVC线槽。 回收PVC线槽的缘故起因是取材轻易、价值自制,一样平常的五金店都有卖,并且便于加工、强度和重量都吻合。 ○ 其他原料,详见作者 小我私人博客 。 ● 在作者的 另一篇博文 里,有关于器材的具体先容。
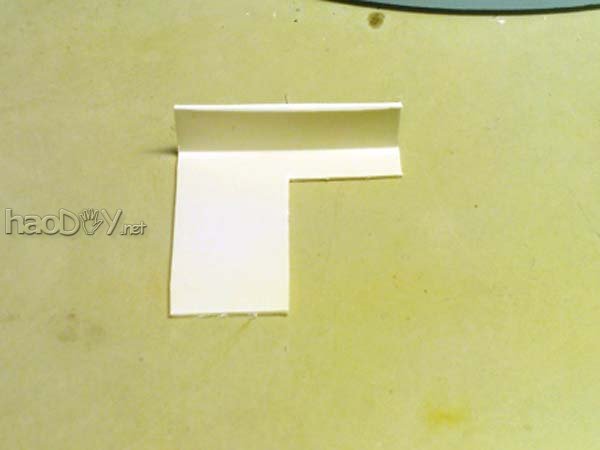
2 根基机器布局 2.1 原始加工件
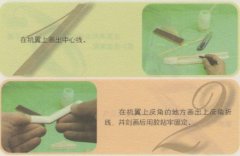
● 把PVC线槽切成枢纽的外形。
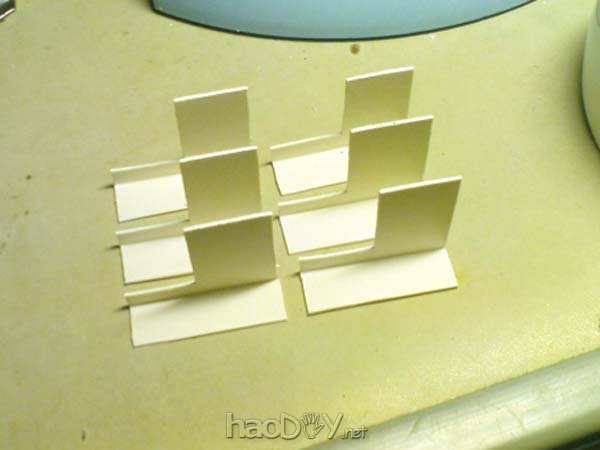
2.2 大腿横向枢纽
● 这是6只大腿的横向枢纽,弄好后才发明,所有都是一样。个中3只要重做,应该是两两对称的。
● 重做之后的6只枢纽。
2.3 枢纽节制的舵机
● 思量尽也许的缩小体积,以是回收的是2.5g微型舵机,6只脚每只3个枢纽,总共18个枢纽,也就是18个舵机。(由于数目较量大,这个耗费照旧较量多的,有点心疼)。
关于 2.5g微型舵机
● 把舵机实行安装到枢纽件上。
2.4 完美枢纽件
● 进一步打磨修饰枢纽件。 ● 还可以看到PVC线槽上的标号(这个最后换掉了)。
● 完成后的6只大腿的横向枢纽件。
2.5 安装枢纽舵机
● 大腿横向枢纽上的舵机已经装好。个中一个舵机毗连主躯干,另一个毗连大腿的纵向枢纽。
2.6 安装主躯干
● 主躯干也是用PVC线槽做的,毗连上6只大腿横向枢纽。 ● 枢纽舵机与躯干是靠舵盘毗连的,舵盘是用自攻螺丝牢靠在躯干上。中间有一个洞是用来给自攻螺丝最后总装时牢靠嵌入的舵机主轴的。
● 来一个前景,看到一点加工的现场。 ● 为了更平稳,并减轻重量,每个舵盘的牢靠螺丝由2颗大号的自攻螺丝改为4颗1.2mm的带螺母的小机牙螺丝。 ● 其它,关于大腿纵向枢纽和小腿枢纽的图片,着实都差不多,只是外形有差异,可是因为中间忘了照相了,以是这里就省略掉了。
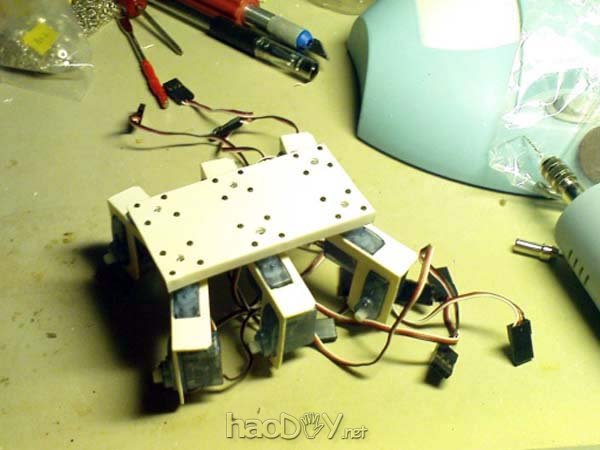
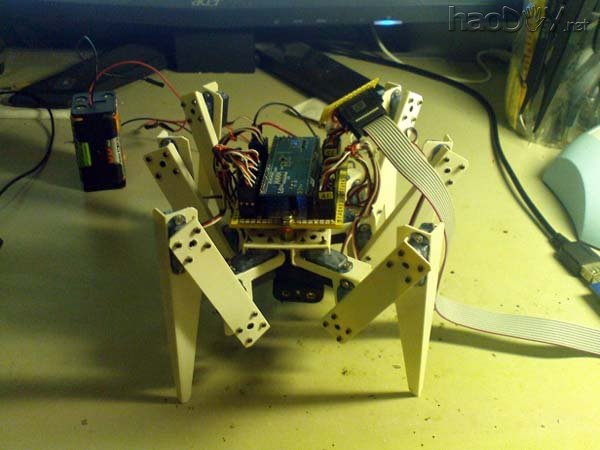
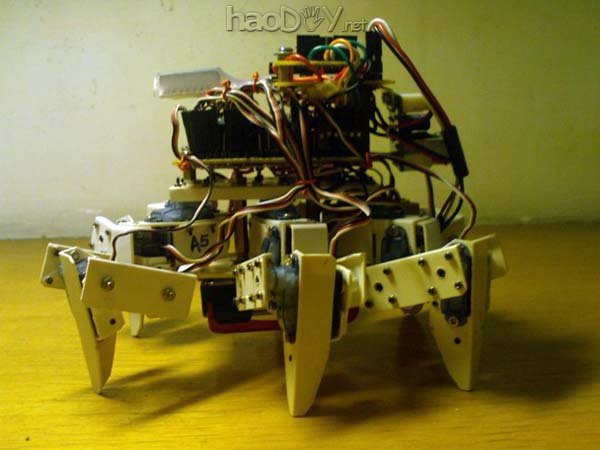
2.7 完备的机器布局
● 完备组装好的机器布局,有点样子了。 ● 主躯干、大腿横向枢纽、大腿纵向枢纽、小腿枢纽,都是PVC线槽做的。18个枢纽的舵机也所有装好。(换了一个LED配景灯光,照片有点重影) ● 原来躯干上牢靠舵机舵盘的螺丝都是螺母在下面的,可是由于选择的螺丝长了一点,往下装会影响底部舵机的旋转,以是改为螺母向上装,固然是看起来是丢脸一点。不外后头会在躯干上再装上电路板盖住一点,相对就好一些。
3 根基电路体系 3.1 节制电路
● 节制电路的焦点回收AVR单片机的MEGA16芯片,思量到体积,同时也想有点挑衅性,没有直接用现成舵机节制板,而是用焦点板筹备本身写舵机节制措施。
关于 M16焦点小板
3.2 电路调试
● 起源完成根基电路的安装,毗连电脑烧录措施,举办简朴的舵机节制的调试。 ● 确定舵机举措幅度所必要的PWM频率时,用到了 舵机测试器 ● 除了通过USBASP毗连电脑之外,电源也暂且是外接的电池组。
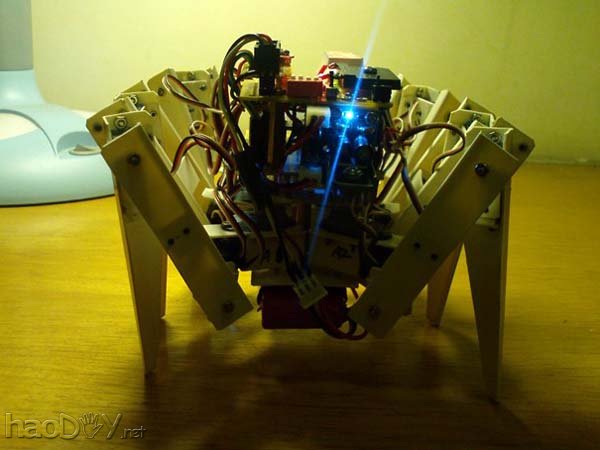
3.3 张牙舞爪
● 编好牢靠举措的措施,烧录到电路上,举办简朴的举措调试。 ● 来一个“张牙舞爪”的举措。 ● 很酷吧,不外肚子照旧趴在桌面上的(肚子下面是电池盒以及6只大腿横向枢纽)。
3.4 缩成一团
● 再来一个举措“缩成一团”。 ● 这个举措的名字起得不怎么样,照旧靠肚子顶住桌面的。
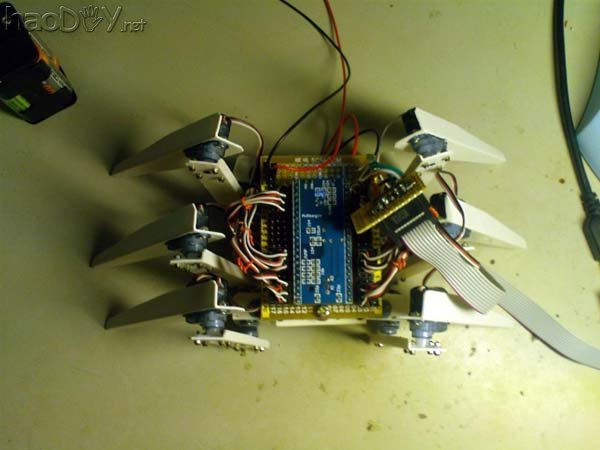
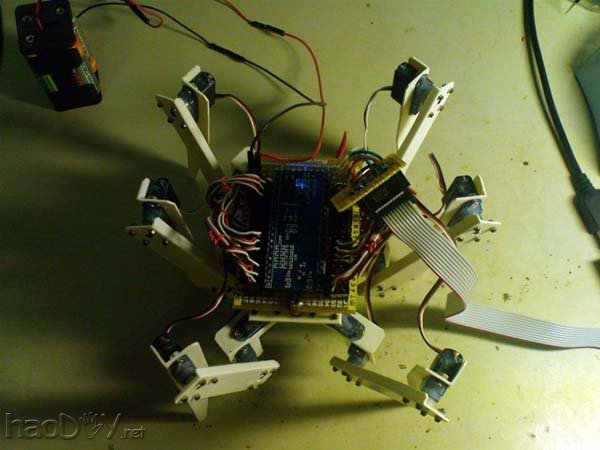
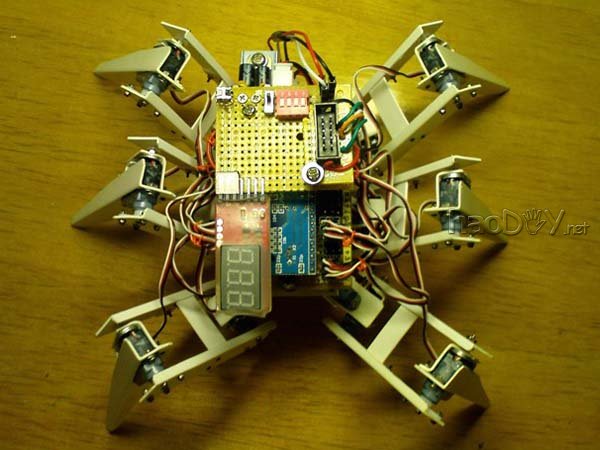
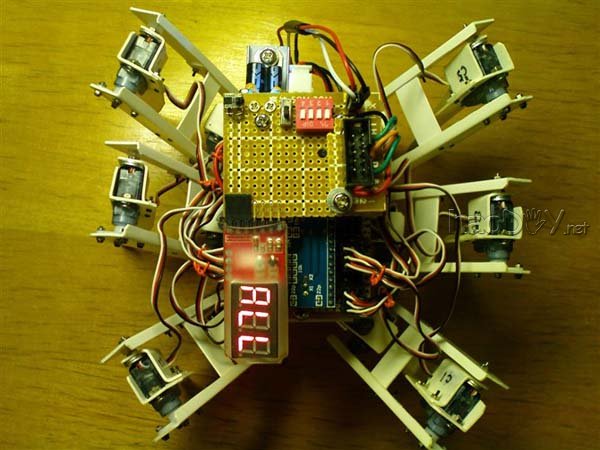
● 这是俯视图。
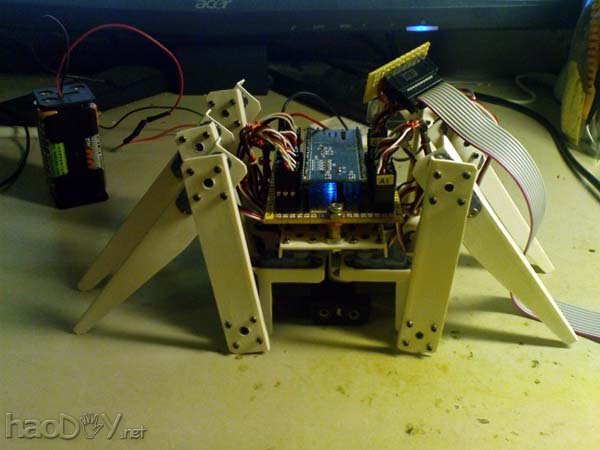
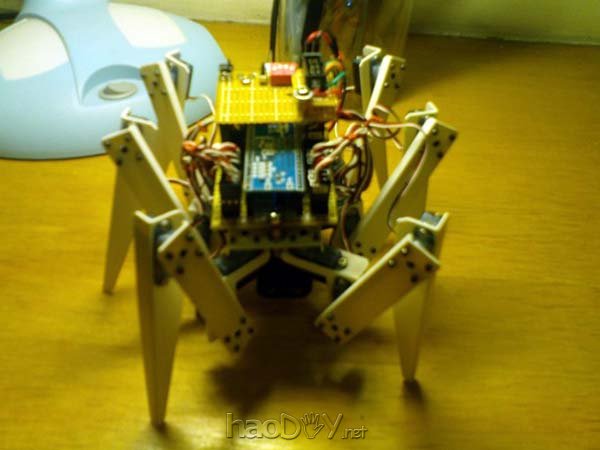
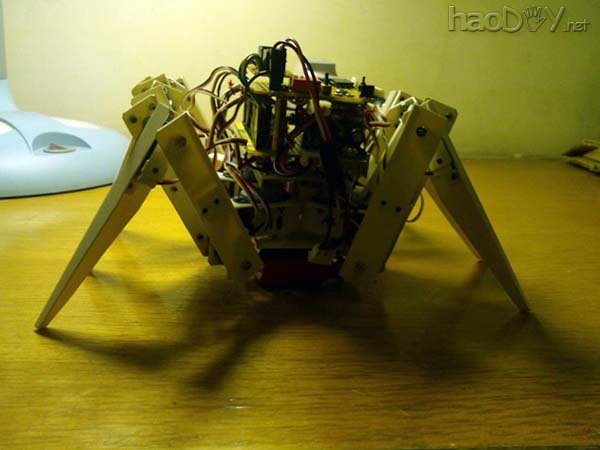
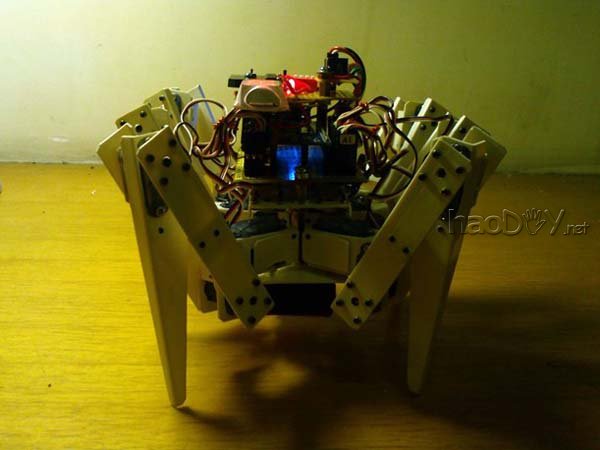
3.5 站起来了 #p#分页问题#e#
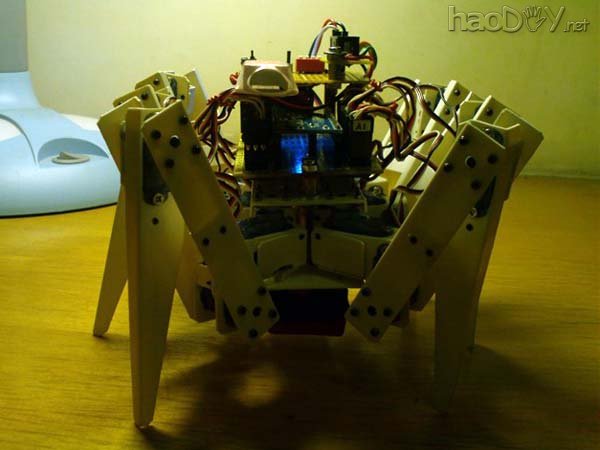
● 列位观众,接下来是要害的一个举措——从趴着的状态下自行站起来。 ● 它站起来了!没错,它完端赖本身的力气站起来了! ● 固然有点艰巨,站起来后照旧有点歪歪扭扭的,但终究是站起来了。(开始一向担忧舵机的力气不敷,不能本身站起来……)
● 站起来后的俯视图。 ● 舵机的力气确实不敷,小腿必需是直的(斜的话撑不起来)。并且固然站起来了,可是舵机因为力矩偏小,照旧有点吱吱的发抖。 ● 这还没有装上电池,但愿加上电池的重量后舵机还能顶住。
3.6 完美供电
● 原来但愿把舵机和单片机的电源完全独立分隔,以停止滋扰,最后是只用了一个组电池:舵机直接接电池,单片机通过稳压电路毗连统一组电池,实践证明中间的稳压电路照旧可以或许很好的实现抗滋扰的断绝成果。 ● 舵机供电,开始曾经思量过用2节5号镍氢电池通过一个DC-DC大电流升压板的升压到5V给全部舵机供电,经尝试后发明完全行不通——18个舵机必要的电流太大了,最后只能思量直接用2节3.7V的7号锂电串联起来供电。
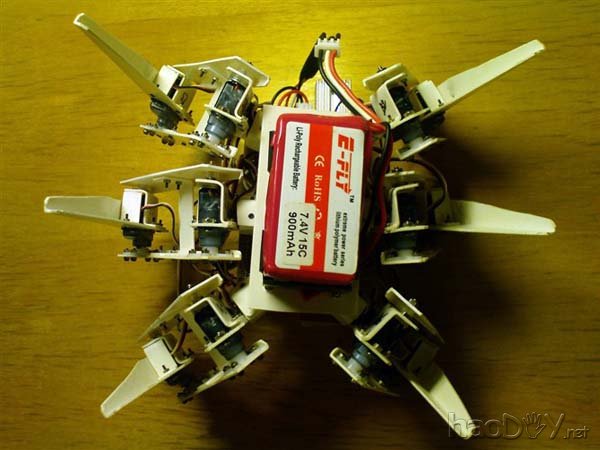
● 翻过来,可以看到底部的电池。 ● 单片机供电,原来思量回收一节7号镍氢电池通过一个块微型DC-DC升压板升压到5V,为缩小体积其后也思量过用3V的CR2032纽扣锂电升压,但现实调试后发明电流也较大一下子就耗光电池了。最后是用一块7805稳压小板直接接到2节锂电上得到5V电压。 关于微型升压板:?id=4039234002
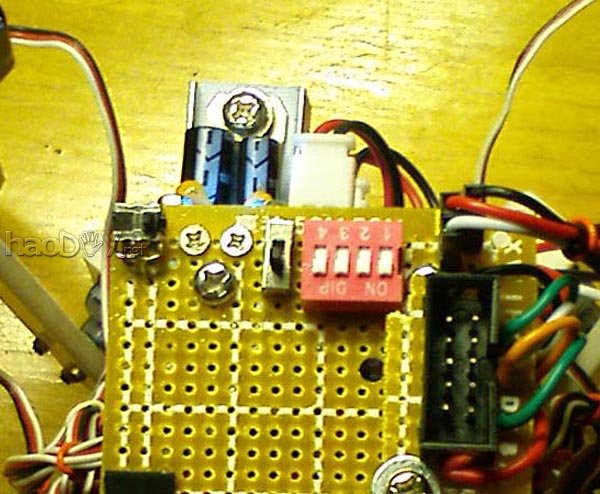
3.7 完美电路
● 给电路上加上了几个节制开关(总电源、舵机电源、单片机电源、单片机复位)。 ● 接USBASP的10Pin插座也牢靠在了顶部的线路板上。
● 其它顶部的电路板留了一些位置,筹备往后接传感器用的。
● 侧视图,可以看获得屁股后头的带散热片的7805稳压芯片。
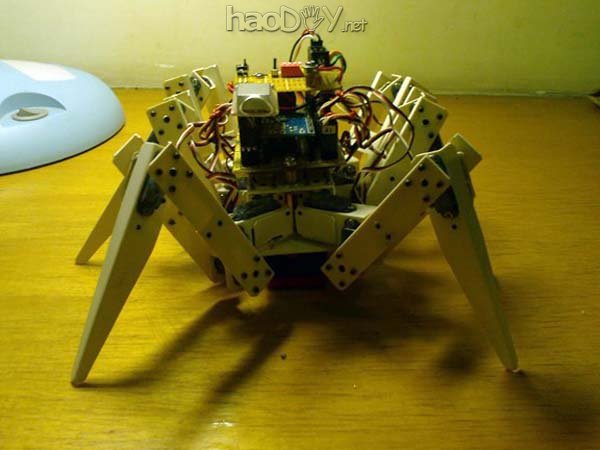
3.8 全负荷状态
● 把2节7号的锂电池都装上,在全重状态下,也能简朴的站起来。 ● 终于松了一口吻,固然尚有一点发抖,但终究是可以或许独立站起来的。 ● 照片有点恍惚,也许是本身有点感动,照相的时辰手抖了。
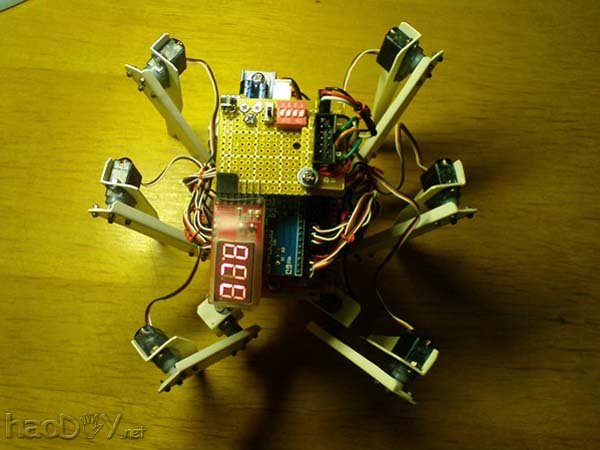
3.9 继承完美
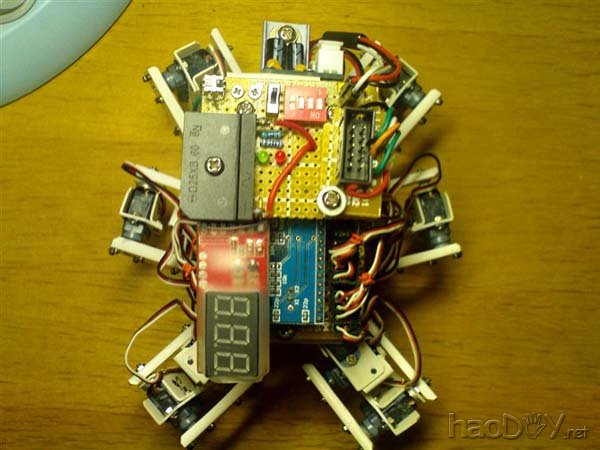
● 18只舵机,耗电照旧较量大的,以是再加装了一块电池的电压监控板,可以及时看到锂电的电压变革环境。
● 与一个香烟盒比拟巨细。 ● 接下来的事变照旧在继承调试措施节制举措,最终思量加上一些传感器并支持用红外可能蓝牙举办遥控!
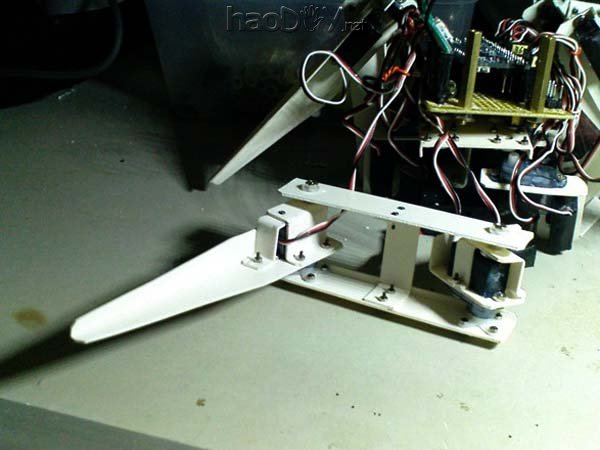
4 完美机器布局 4.1 加强腿布局
● 原本的腿布局是直接比较原型CG图的,也许是为了雅观忽略了现实的机器机能。 ● 可是此刻,为了动力更足,为了舵机的寿命,也顾不得保持原本的芊芊细腿了,于是抉择对腿的机器机构举办加固——该肥照旧让它肥一点吧,康健最重要,嘿嘿! ● 这是加固之前,腿各枢纽都是直接单边牢靠舵机的舵盘,有点微弱,力气漫衍不平衡支撑起来不是很稳,对舵机的压力有点大,长时刻开机轻易破坏舵机。
● 加固之后:凭证传统的机器布局举办增强,即舵机的另一边也增进牢靠的支撑轴,以确保受力均衡。
● 全部枢纽的舵机都加上外衣,并在其它偏向延迟出一根螺丝作为牢靠轴。
4.2 安装加固底盘
● 在底部的大腿纵向枢纽,加上一块底盘。
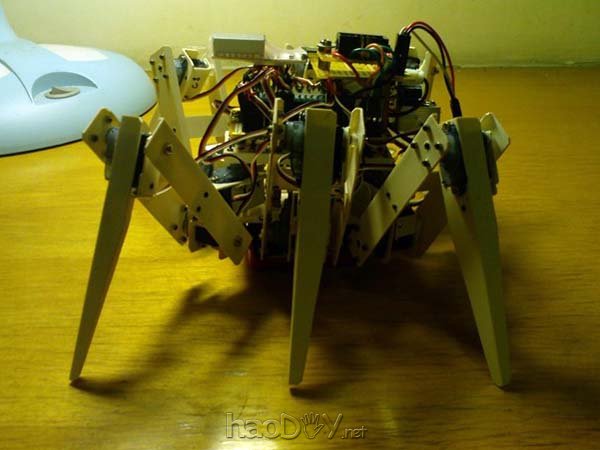
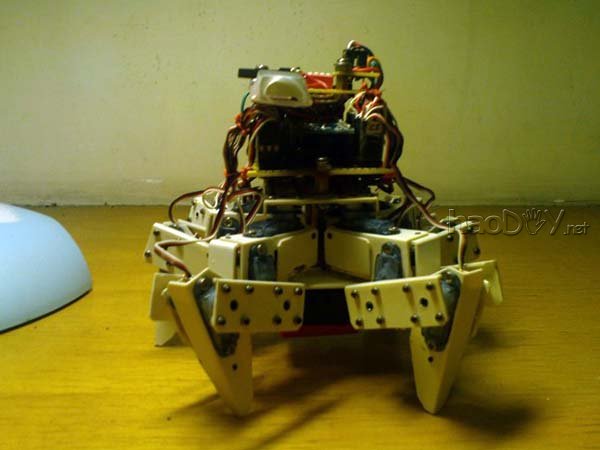
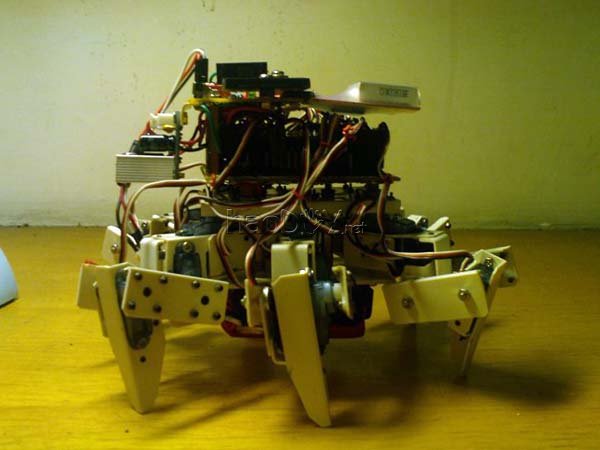
4.3 完备的新布局
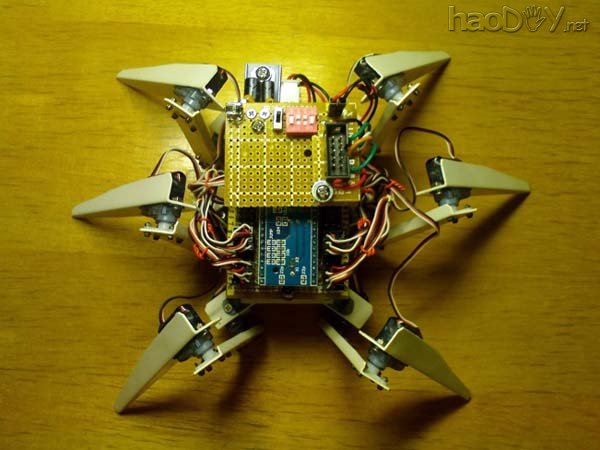
● 正视图,全部枢纽布局都有所加强。
● 后视图
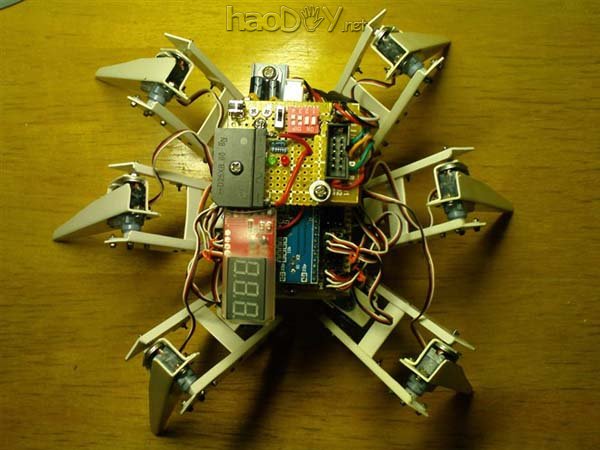
● 俯视图 #p#分页问题#e#
● 侧视图
● 底部特写。加固了全部枢纽,并加大了锂电容量。
4.4 新布局的启动
● 启动,自行站起来。
4.5 完美电源体系
● 锂电池的电压是7.4V,而舵机凡是的最高电压是6V。为了掩护舵机延迟其寿命,可以串联两个硅整流二极管用来降压。每个二极管可以降压0.7,两个降1.4V,恰恰可以把7.4V降到6V。 ● 因为18个舵机一路电流很是大,一样平常的硅二极管功率不足,爽性用了一个整流堆D25XB的个中两个二极管。
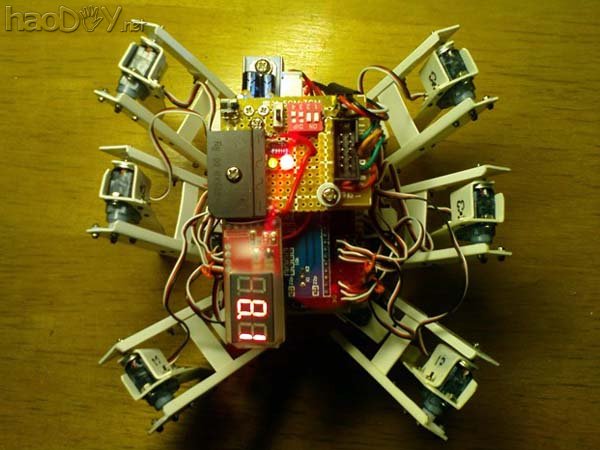
● 增进了两个LED发光二极管。红的指示总电源打开,绿的指示舵机电源打开。
● 后视图,蓝灯是单片机供电指示。
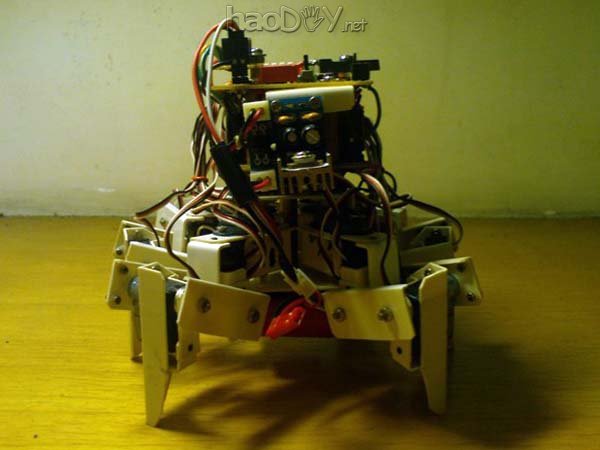
● 正视图,蓝灯为单片机焦点板上的指示灯,红灯为总电源指示灯。
5 实现起源行走 5.1 机器定型
● 在计划行走步态的时辰,发明白一个严峻的题目,就是支撑腿的力气照旧不敷——首要是因为追求小型化而回收最小型的2.5g舵机,因为舵机力矩不敷,导致支撑腿力气不足,静止站立的时辰还始末,但在行走时就常常产生“腿软”征象。 ● 为办理这个题目,曾经一度想要换成大一点的9g舵机,可是一旦那样的话因为尺寸会大许多导致机器部件根基都必要从头制作,那样不异于从头做一个新的了。再三思索,想到了把全部的机器腿都收缩,也就是减小力臂的长度,从而低落对舵机的压力。 ● 颠末从头计划试验,把全部的腿都收缩了,固然丢脸了不少——“短腿了、不再高挑”,可是确实办理了“腿软”的题目,也根基确定机器部门的定型。
● 俯视图
● 侧视图
● 侧视图
● 后视图
5.2 起源行走
● 仿照昆虫来计划步态,起源实现了行走。举措照旧有点生硬,并且步子太小,移动速率照旧有点慢,走直线还不足直,仍需继承完美。 ● 配景声音中有节拍的“咄——咄”声,着实是由于步态尚有点生硬,脚触地刹时敲打桌面的声音,假如是地板就不会有这样的声音。 ● 这段内里有我们家旺财,它瞄了一阵这只怪异的怪物,有点畏惧的走开了,呵呵~
寓目各角度的 行走视频
6 举措调试完美 6.1 踢踏舞步
● 最初的这个行走不足天然顺畅,可是看起来还蛮有节拍的,并且尚有“顿脚”的“咄咄声”,就像跳踢踏舞一样,暂时命名为“踢踏舞步”吧,呵呵。
6.2 直线行走
● 对踢踏舞步进一法式整,发明要实现很天然的行走照旧有难度的,暂且也只能做到轻微再把速率加速一点。 ● 把阁下双方的6只脚别离编号,一边是单号,即1、3、5,另一边是双号,即2、4、6.。仿照六足动物行走,两组脚,每组3只(一边的2只加另一边的1 只,即1/4/5和2/3/6),两组脚瓜代抬起向前摆动,按照三角形的不变性,统一时刻都确保有一组脚(3只)是着地的。 ● 原本是只有在腿放下今后摆动的刹时,整体是往前举办一次移动,为加速速率,此刻在脚前摆的刹时,后脚同时增进了一个向后蹬的举措,即多了一个时刻点向前移动。因此整体行进速率快了一点。 ● 不外,即便云云,整体举措的和谐性照旧和真实动物的举措差远了,首要缘故起因照旧在于调试较量伟大,并且舵机举措的精度照旧不足。暂且也只能先这样,先调试好举措就增进举措的自动节制之类的,至于举措和谐性完美等往后有精神和前提再逐步弄吧。
踢踏舞步和直线行走视频 (责任编辑:admin) |