|
有的朋友觉得制作机器人很难,需要很多工具和很长时间,其实未必!
我这次的制作是一个简单的机器人,用普通的开关作为传感元件,并使用了简单的翻转摇摆装置。
当机器人将要跌倒时,马达便会启动并转向跌倒的方向,这样马达转矩的重心便高于马达,于是机器人依然能够平衡站立而不会跌倒。 第1步材料准备做这样一个机器人,你只需要以下零部件和工具:
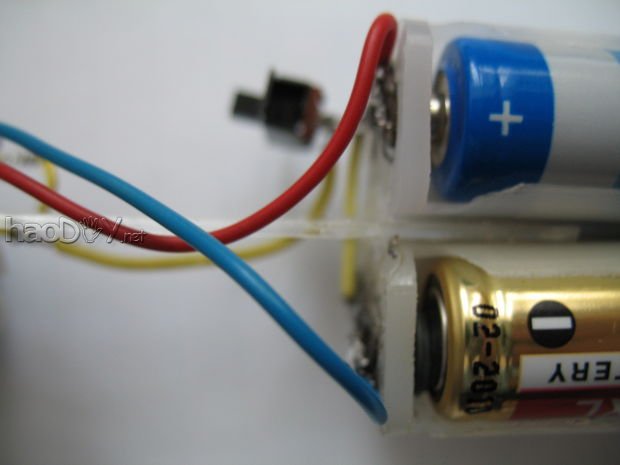
小型的电子马达 齿轮(或者带齿轮箱的马达) 一根轴杆 两个轮子 一些塑料,用于做轴承和机器人的脖子 电池座 4颗AA电池 1颗纽扣电池 1个带金属杆的SPDT(单刀双掷)开关 1个拨动开关作为机器人的开关 1颗钉子 一些导线 电烙铁
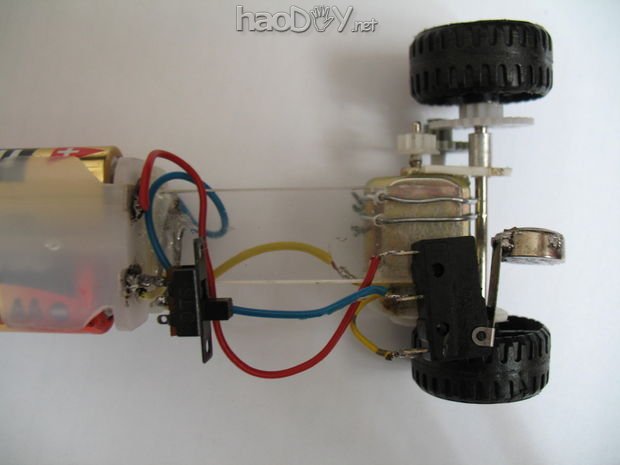
胶水 第2步制作主系统
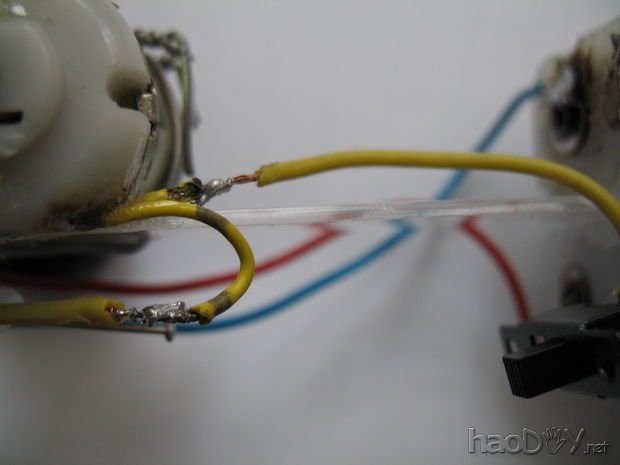
这一步制作传动系统。如果想简单点,你可以在普通的小马达上添加一些齿轮,然后连接到横轴承上,安装好两个轮子。这一步也可以用马达和齿轮箱来完成。 第3步制作机器人的头和脖子用胶水把塑料板粘贴到马达上。
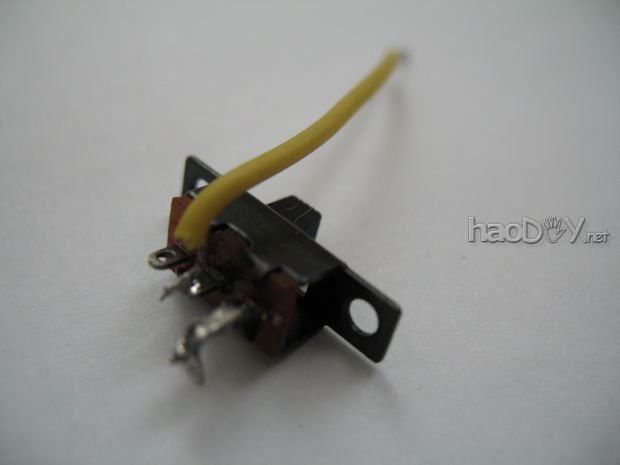
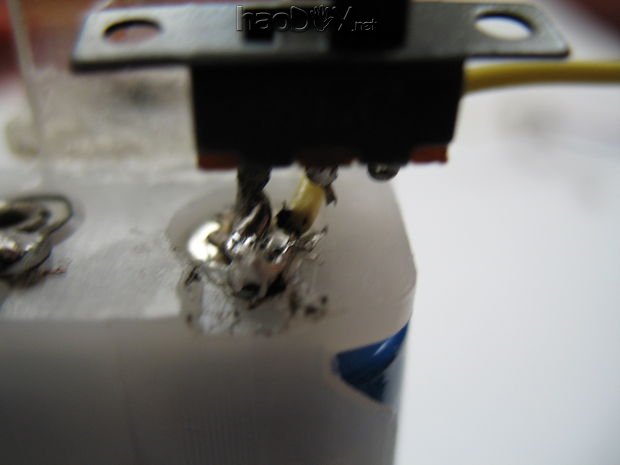
然后在电池座的一端涂好胶水,粘贴到塑料板的顶部。 第4步制作传感装置把纽扣电池焊接到SPDT开关轴上。 将钉子头用火烧热,安装在马达上的塑料板上,其位置要确保当机器人直立时,纽扣电池要碰到地面。
用胶水把开关贴到机器人上。
|