|
自做六自由度双足步行机器人  
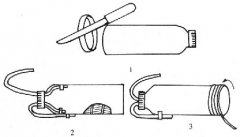
一、制作六自由度双足机器人步骤: 1、确定舵机:舵机的好坏直接影响机器人的效果; 2、自制舵机后盖:它是连接舵机和U型架的重要组成部件;(买一个标准的舵机后盖是最好不过,但你的动手能力和思考问题解决问题的能力就没有提高,因此我选择自制一个舵机后盖) ①选择铁皮为制作材料; ②测量舵机尺寸,截取合适铁皮条(尺寸为20mm*116mm); ③折弯,注意左右对称; ④确定固定用定位孔的位置,并使用1mm钻头打孔; ⑤打固定用螺丝孔(使用3mm钻头); ⑥确定舵机输出同轴定位孔的位置,并使用1mm钻头打孔; ⑦打舵机输出同轴螺丝孔(使用3mm钻头); ⑧打舵机后盖过线孔(6mm*8mm); 注:脚上的舵机后盖比较特殊,要考虑它要和脚底板相连,我的解决方法是在上述舵机后盖的基础上,增加宽度,并折弯,打孔,同脚底板相连。 3、自制U型架:在双足机器人中,舵机相当于人的关节,那U型架就是人的骨骼。U型架的制作:(以下是我的设计,可根据具体需求,自行设计尺寸) ①选择铝合金板(厚度一般为1.5mm); ②将铝合金板切成细条(尺寸为20mm*116mm); ③折弯,注意左右高度相等; ④打定位孔(使用1mm钻头),注意孔的位置以U型架的“U”字底为基准; ⑤打螺丝孔(使用3mm钻头); ⑥磨削加工。 4、自制脚底板:脚底板的设计可以多种多样,但要保证一点,即机器人抬脚走路时,要保证重心用你设计的脚底板可以承受得住。 5、自制机器人腰部:其实就是连接两条腿的部件,长宽是根据设计的脚底板的大小确定的。  二、需要注意的问题: 1、机器人左右质量要保证尽量一致,否则走路会有偏差。 2、制作部件时,要注意基准。 三、软件编程: 软件编程,主要是靠控制舵机旋转不同的角度。 仍然存在的问题: 走路不够圆滑,看起来咔咔咔……根本原因就是舵机转速不能够得以控制。这样就造成走路不稳定,容易偏移行走轨迹。希望坛友们给予帮助,笑看人生在此不胜感激。 (责任编辑:admin) |