|
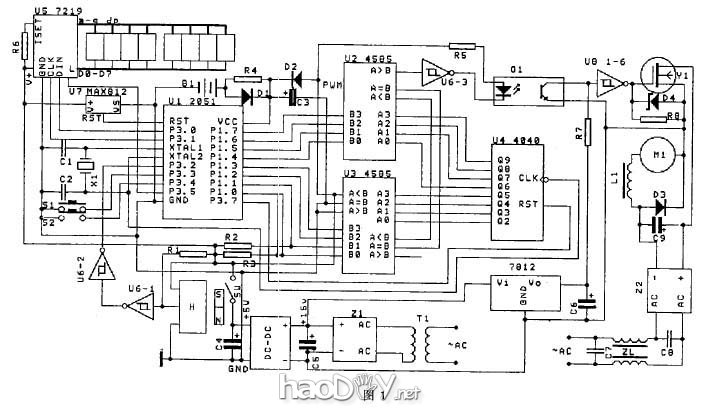
择要:推出一种行使单片机的PWM直流电机闭环调速体系。本体系布局简朴,价值低廉,在现实应用中结果精采。 回收硬件电路实现直流电机闭环调速体系已在实践中应用多年,其硬件构成伟大,调解坚苦,缺乏节制的机动性。本文先容的直流电机PWM闭环调速体系,行使低价位的单片微机89C2051为焦点,实现闭环节制,并可举办数字表现和速率预置,利便了行使。电机调速回收脉宽调制方法,与晶闸管调速对比技能先辈,可镌汰对电源的污染。本体系已用于健身跑步机调速,事变靠得住,行使结果精采。图1是本体系的线路图,首要有PWM信号产生、闭环调速微机节制、直流电机驱动等几部门构成。 1 PWM 信号产生电路 PWM波可由具有PWM输出的单片机(如80C198等)通过编程发生,也可回收PWM专用芯片来实现。PWM波的频率太高时,对直流电机驱动 的功率管要求太高,太低时发生电磁噪声较大。实践应用中PWM波的频率在18kHz阁下结果最好。经综合说明,本体系回收两片4位数值较量器4585和一片12位串行计数器4040构成了PWM信号产生电路。两片较量器U3、U2的A组接4040计数输出Q2~Q9端,B组接单片微机的P1端口。改变P1端口的输出值,可使PWM信号的占空比发生变革,举办调速节制。计数器4040的计数输入端CLK接单片机2051晶振的振荡输出XTAL2。晶振选用18MHz时,经QO~Q2的8分频,Q2~Q9的256分频,发生的PWM波形的频率为17.6kHz,得当光耦及功率开关管的公道事变范畴。 计数器4040每来8个脉冲,其输出Q2~Q9加1,当计数值小于或便是单片机P1端口输出值X时,U2的(A>B)输出端保持为低电平,当计数值大于X时U2的(A>B)输出端为高电平。跟着计数值的增进,Q2~Q9由全“1”变为全“O”时,(A>B)输出端又变为低电平,这样,在U2的(A>B)端获得PWM的信号,其占空比为(255-X/255)×100%,改变X值可改变PWM信号的占空比,举办直流电机的转速节制。行使此要领单片机只需按照调解量输出X值,PWM信号由三片通用数字电路天生,使软件大大简化,有利于单片机体系正常事变。因为单片机上电复位时P1端口输出全“1”,行使4585的B组与P1端口相连,升速时PO端口输出X按必然纪律镌汰,降速时按必然纪律增大。
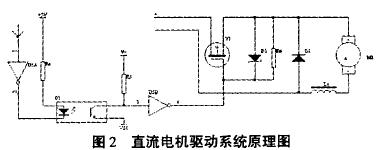
2 单片微机闭环速率节制电路 本体系的闭环节制选用低价位的单片机89C2051,与带PWM输出的80C552及80C198对比,无需外扩EPROM,且价值低的多。2051单片机片内有2K的flash措施存储器,15个I/O口,两路16位的按时/计数器,指令及间断体系与8031兼容,给闭环速率节制带来很大的机动性。 闭环速率节制中传感器选用霍尔传感器,小磁钢牢靠在被测转轴上,每转一周输出一个脉冲信号。转速脉冲信号经施密特触发器U6-1,U6-2整形后,输入到2051单片机的INTO间断口P3.2端口上。软件配置INTO为降落沿间断,进入间断处事措施后开启按时/计数器O举办按时,测出每转的周期,再由软件计较出节制值X,由P1端口输出PWM波占空比的节制数。软件中还可举办表现线速率或角速率的转换计较,由八位驱码驱动器发动LED数码管举办表现。预置速率由按键S1、S2输入,举办“+”“ -”节制,预置数也由LED数码管表现。 表现行使了高集成度的MAX7219串行LED表现驱动器,发动八位LED数码管举办表现,前四位表现当前运行速率,后四位表现预置速率。 MAX7219是24脚窄封装芯片,串行口事变频率最高10MHz,八位LED表现,通过对译码模式寄存编程,可节制列位表现方法(BCD码或非译码),表现是片内动态扫描模式,通过一个电阻和编程可节制亮度,并可多个芯片串联表现多达64位共阴极LED数码管。MAX7219的数据输入端DIN、时钟端CLK、数据锁定端L别离与2051单片机的P3.0、P3.1、P3.5端口相接。改变电阻R6的阻值可调解表现亮度,R6取值在3.9~10kQ之间。行使MAX7219不只可镌汰硬件电路,因为是片内动态扫描表现,并可低落功耗和简化软件计划。 2051单片微机的上电复位行使了MAX812电压监控器,上电时约有200 ms的耽误,以担保复位正常举办。为了防备掉电后预置数丢失,行使了行使备用电池掩护2051单片机片内RAM数值。电源经变压整流后,一起经DC-AC开关电源输出5V直流电压给单片机体系供电,一起经三端稳压元件7812稳压输出12V电压供驱动大功率开关管行使。单片机体系电源与驱动电路部门电源断绝,以进步体系事变的靠得住性和安详性。 3 直流电机驱动体系电路 直流电机驱动体系道理如图2所示
U2天生的PWM信号经施密特反相器U6-3驱动光电耦合器O1,送至直流电机驱动电路。大功率开关管选用N沟道VMOS功率场效应管,它为 压控元件,具有很高的输入阻抗,因而驱动功率很小,对驱动电路要求也较低。经光电耦合器传送的PWM信号,经并联行使的六施密特反相器,接到VMOS功率管Y1的栅极上,直接驱动即可。稳压管D4和电阻R8起掩护浸染。VMOS功率管的源极接直流电机绕组,经感抗器接电机直流电源负端。漏极接电机直流电源正端。快速关断二极管D3起掩护浸染,消除VMOS功率管开关进程由电机绕组发生的感生电势。电源是交换电压经C7、ZL、C8构成的滤波器后,由高压桥整流器件Z2整流,高压电解电容滤波后供VMOS功率管。VMOS功率管,快速关断二极管及高压电解电容器及整流桥等按照选用直流电机的电压、功率等要求确定响应型号和参数。 4 竣事语 本文所述的直流电机闭环调速体系以低价位单片微机89C2051为焦点,PWM波的天生行使三片通用数字电路,表现行使了高集成度的八位LED串行译码驱动器MAX7219,电机驱动行使VMOS场效应管,反馈信号行使霍尔传感元件,体系计划公道。行使单片机按时器对传动轴的周期举办检测,可由软件计较出响应的线速率或角转速举办表现,并可举办速率定量预置。软件中可用PLD算法或查表的要领确定闭环节制的赔偿量。这些是由数字线路构成的直流电机闭环调速体系所不及的。早年也曾试过行使单片机的按时/计数器直接天生PWM波,这样使软件频仍事变在间断处事水平中,整体结果不太好。行使少量硬件后单片机仅输出X值,使软件事变量大大镌汰,措施中有富裕时刻举办闭环节制的测控和计较,使措施计划和软件运行公道靠得住。 (责任编辑:admin) |