|
列位有没有想过要本身制作一架旋翼机?又是否曾经被四轴旋翼机的繁琐与伟大所困扰,而最终放弃对他的研究? 本文将着重教会各人不要gps,不要电调,不要单片机,不要螺陀仪,用最简的要领打造一架属于本身的旋翼机!
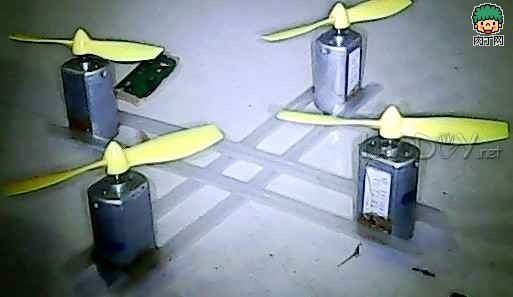
此系本次diy所用的原料:7.2v充电电池组 ,4个重量低于20k的航模马达,四通遥控,和木板尚有继电器,以及。。。航模旋翼扇叶(不是电扇扇叶)。
先将扇叶插在马达的轴承上
依次插四个
将马达排好,用吸管如图毗连
上一点要干几天的录丁胶在毗连处
做两组,趁便两组马达的另一面也这样做,最后,假如正常,你会用掉四根吸管
做好后
再来一张,这次较量清楚
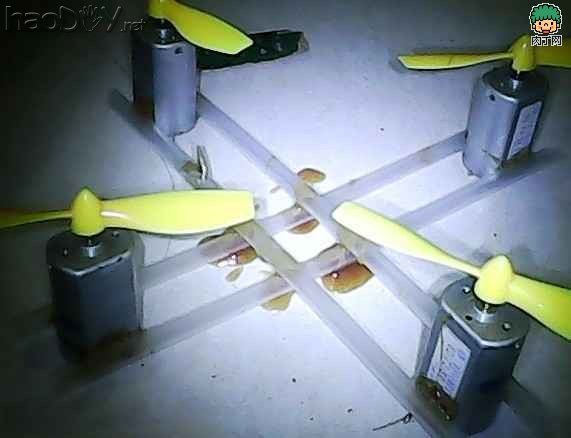
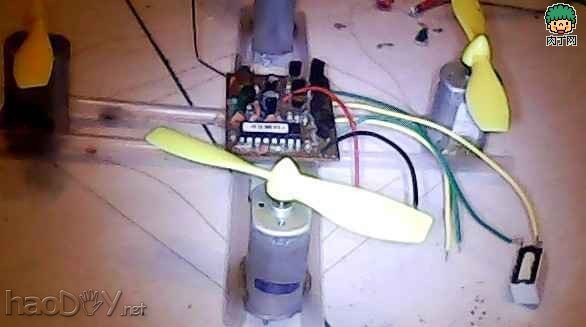
像这样子十字重叠,留意,有一组马达要靠前一点,不是为了此外,这样做是为了制造升力差从而使航行器从上升力中获得向前的动力
这张图就较量清楚了,列位可以明明的望见,有一组马达略微靠后或靠前
滴胶。。。不表明。。。假如你哪天能不滴胶使两个原料在非融化,非嵌入的环境下粘合的话,你就赢了!~喵
将四个马达用铜丝(不是“电线”)并联如图:留意保持马达电极统一个极性的电极都被一条线相连,也就是4个正极连一根线,四个负极连一根线。。。假如不这样,效果也不表明!
坑爹的特写
有些马达用红点代表正极,这为我们的事变节减了大把银子和时刻
在红圈处焊接导线,如图
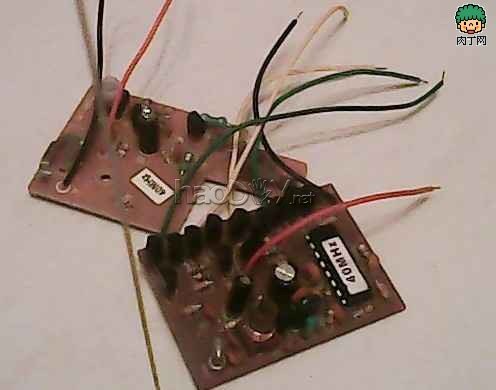
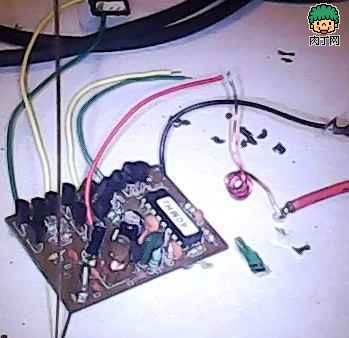
之后,基本的事变就算完成了,你大可以接通atx电源12v5a档看看航行器可不行以飞,一样平常环境下是可以的,而且你的四组马达提供的升力还远远可以搭载一些其他的对象 假如你只是做着玩玩,到这一步就应该满意了,下面,针对美满主义者,我将指导你为你的附近旋翼机安装四通遥控版以及共同遥控板行使的3v继电器 做到这里,我们必要一个3v的四通遥控吸取+发射板
然后我们拿出继电器,毗连在接管版的恣意一组输出上
连到继电器有一条横线印着的处所
翻过来
之后,假如我们用7.2v的电池给3v发射板直接供电的话,功效必然长短常的“凄凉”,怎么办?这时我们只有靠电阻来办理题目了,图为我的线绕电阻 。ps:姑且找不到得当的电阻,只有手工绕制了。。。列位不要笑。。。假如你们手头找不到吻合的电阻也可以用这种要领~喵
将电阻接在遥控板上,然后毗连电池,测试接管板的三极管会不会发烫假如你的在遥控板100秒后如故不发烫或微烫,那么你可以直接进入下一步
这时辰,我们用遥控板来遥控接管板,假如这个时辰你听到你接管版上的继电器发出吸合声,那么。恭喜你,你又可以进入下一步。。。
将接管板牢靠在机架上,这时辰,你可以用胶布绑缚,也可以用录丁胶或502粘合,我小我私人提议你用录丁胶牢靠接管板
将马达组的一根前文我们预留的导线焊接在继电器的开关脚上。我保举用常关4脚3v继电器(通电导通的四脚3伏继电器)虽然,这是最最最后的事,假如你买了6脚或更多脚的继电器也无所谓,横竖接发都一样。。。
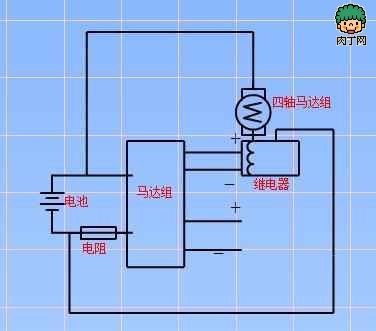
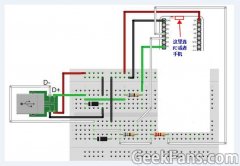
这是电路图。在前文的基本上焊接完它后,你的四轴旋翼机就根基上完成了 最后,测试你的旋翼机: 按下发射板的一组按钮,假如马达不转,你再换一组按钮,假如马达不单转了,并且四轴旋翼机还飞起来了,那么你就必然乐成了,反之,假如马达转反了,风往上面吹,那你把马达组的两个电极对换一下根基就能办理之~假如不转,(ps:此处引用微软的说话)那请你接洽你的配件提供商获取有关信息,可能将该装备替代。。。 此时,你尽可以施展本身的想象为本身的四轴旋翼机安装上转向马达,led二极管等小配件,而这些对象的安装要领超简朴,不比我过多赘述。 而我的四轴旋翼机呢,因为电池题目无缘飞上蓝天,不外我会尽快想步伐办理,并发上有关教程。 然后在这里发句怨言:(坑爹的电池组。居然重达0.25kg。。。航行器想都别想发动。。。) (责任编辑:admin) |