现在的编码。好,这个代码是当鼠标进入陷阱伺服旋转180度从而关门。然后,绿灯熄灭,红灯亮。同时激活蜂鸣器。所以现在的代码是写在下面:
#包括<伺服。”/ /包括伺服图书馆
国际redpin = 5;//名字digitalpin 5 redpin(这是我们的红色LED)
国际greenpin = 6;//名字数字引脚6为greenpin(这是我们的绿色LED)
国际trigpin = 7;//名字引脚7为trigpin
国际ecopin = 8;//名字引脚8为ecopin
伺服servo1;/ /的名字我们的伺服servo1
在距离、时间;//让两变量命名的距离和时间
int蜂鸣器= 10;//名字引脚10为蜂鸣器
setup() { void
/ /把你的设置代码,运行一次:
pinmode(redpin,输出);//设置redpin输出
pinmode(greenpin,输出);//设置greenpin输出
pinmode(trigpin,输出);//设置超声波传感器trigpin输出
pinmode(蜂鸣器输出);//设置蜂鸣器输出
pinmode(ecopin,输入);//设置超声波传感器echopin作为输入
servo1。附(2);//将伺服引脚2
}
loop() { void
/ /把你的主代码在这里,重复运行:
digitalwrite(trigpin,低);/ /激活trigpin
delaymicroseconds(2000);//激活trigpin
digitalwrite(trigpin,高);/ /激活trigpin
delaymicroseconds(15);//激活trigpin
digitalwrite(trigpin,低);/ /激活trigpin
delaymicroseconds(10);//激活trigpin
脉冲持续时间=(ecopin,高);//定义时间
距离=(持续时间/ 2)/ 29.1;//定义的距离(不要担心,如果你不理解的代码,它是/将时间距离
如果(距离<= 15)//如果距离小于15厘米,然后
{
digitalwrite(redpin,高);//把红色的LED
digitalwrite(greenpin,低);//把绿色LED关闭
servo1。写(180);//把伺服180度
digitalwrite(蜂鸣器,蜂鸣器上转高);
}
其他的
{
digitalwrite(greenpin,高);//把绿色LED
digitalwrite(redpin,低);//把红色LED关闭
digitalwrite(蜂鸣器、低);//把蜂鸣器
servo1。写(0);//把伺服零度
}
}
因此,所有的代码上传到你的Arduino现在会做的伎俩。也要确保你保持你的鼠标陷阱在一个角落里,因为老鼠有一个习惯,会在拐角处。也让一些东西给他吃,这样也会吸引他。所以任务“老鼠出来的房子”是完整的。现在谁跟我在一个额外的芝士披萨

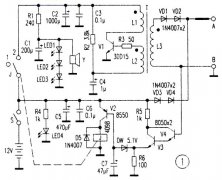
 声光控开关的设计与制作
更新:2012-09-02
声光控开关的设计与制作
更新:2012-09-02
 DIY 合成孔径雷达(SAR)成功
更新:2017-06-16
DIY 合成孔径雷达(SAR)成功
更新:2017-06-16
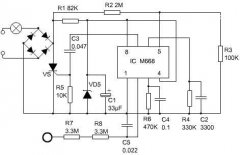 触摸式电灯开关
更新:2012-09-02
触摸式电灯开关
更新:2012-09-02
 废物利用DIY几个墙壁挂钩!!!
更新:2017-06-21
废物利用DIY几个墙壁挂钩!!!
更新:2017-06-21