|
这是12号“索道游者”的吊绳攀爬机器人的改良版,其主要是模仿灵长类动物在吊绳攀爬时的运动方式,攀爬在树枝上或者是吊在绳索上,是依靠双手攀住树枝或者绳索,然后通过双臂交替向前抓握来实现移动的。本项目机器人的造型类似一只猴子,所以又称为“机械猴”。
视频效果:
制作视频教程: (注:视频中涉及到的各零部件的尺寸参数,请参见具体文字教程
一、基本原理: 本项目的吊绳攀爬机器人,以减速电机为动力,通过一个特别的机械结构――连杆机构来实现在绳索上的攀爬运动。
1-运动方式: 本项目机器人在绳索上攀爬,主要依靠双臂交替往前抓握住绳索。看过《动物世界》就知道,猴子等灵长类动物在丛林间攀爬或者在树枝上吊跃就是这种运动方式;另外体育课如果玩过单杠上抓杠前进也应该了解这种运动方式。
2-驱动机理 我们采用电机作为动力,为了实现绳索上的攀爬,需要把电机的旋转运动变为不断前后摆动的抓伸运动――这里我们借助一种称之为“连杆机构”的机械结构来实现。 所谓“连杆机构”,就是将长度不等的几个杆通过铰链连接起来,并能灵活转动,其可以将旋转运动转换为各种其他形式的运动。这里所说“铰链”指什么呢,可以看看家里的房门,门板与门框之间是用合页连接的,门是可以围着门轴随意转动的,但是却无法脱离门轴,这里的合页就是一种铰链结构,即:连接在一起,但又能灵活转动。
以下为两种一样的摆动曲柄滑块机构连杆,前者采用了离心圆盘作为转动结构,而后者则采用了曲柄作为转动结构,两者本质是一样。为了加工方便,一般多用后面一种”曲柄“结构(可省掉一个圆盘)。
为了使本项目机器人能够吊挂在绳索上,机器人与绳索接合的部分设计成了一个吊钩的形状。
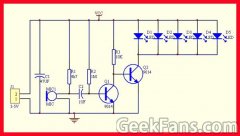
3-电路原理 本项电路原是比较简单的,就是直接一组电池连接一个电机,中间通过一个拨动开关来控制电路的通断。
二、器材准备 电源部件:
减速箱部件:
主体结构部件:
|