仿生昆虫机器人-《无线电》2011年第10期(3)
时间:2013-02-21 11:11 来源:digi01.blog.163.com 作者:digi01 点击:次
|
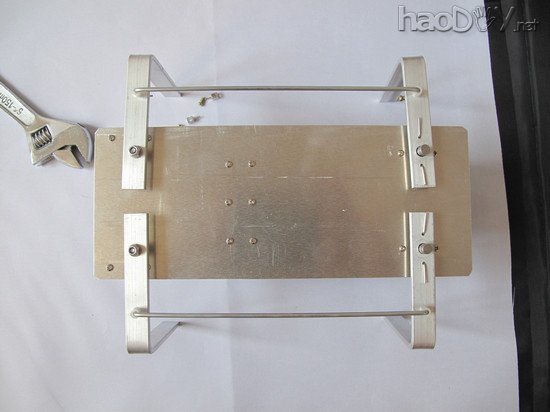
图10 左后腿固定孔特写,中间的大孔用来穿过电机输出轴,两个小孔用来穿过曲别针做的轴销。在打孔的时候我考虑到材料重复利用的问题,这三个孔间距也适用于固定标准舵机的摇臂或者舵盘,方便以后升级之用。此时右后腿已经固定在右后侧电机上,细节见上图。
图11 左前腿,右前腿为从动腿,它们将靠左后腿和右后腿的与之相连的连杆推拉进行运动。使用M3螺丝、垫片和锁紧螺母固定好这两只腿的轴孔,确保它们与机器人主体之间活动自如。
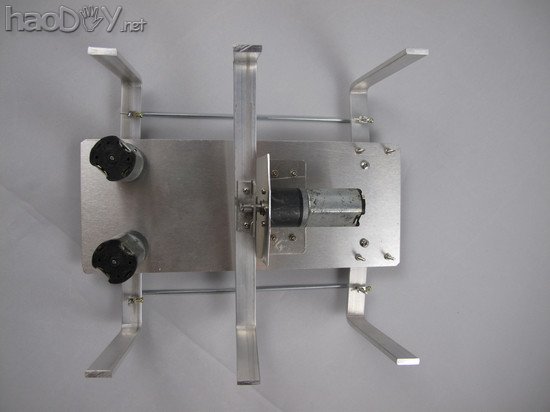
图12 测量好左前腿与左后腿,右前腿与右后腿之间的距离,用车条弯制一对倒U字型的连杆。把圆珠笔芯切成四小段,另外从压线端子排里面拆出四套铜芯待用。
图13 用车条连接好机器人的两侧的左前-左后,右前-右后四条腿。圆珠笔芯切成的小段,垫在车条与腿部的连接孔之间,减小摩擦。
图14 使用从端子排里面拆出的铜芯,以压接的方式,固定在车条的末端,防止连杆在运动的时候脱出。
图15 机器人两侧连杆装配完毕的顶视图。喘一口气,看着这只已经完成了一多半的小怪兽,感觉还不错。
 。。。。。。 (责任编辑:admin) |