仿生昆虫机器人-《无线电》2011年第10期
时间:2013-02-21 11:11 来源:digi01.blog.163.com 作者:digi01 点击:次
臧海波

题图 在制作了一系列单电机和双电机驱动的简易机器人以后,我开始试着制作稍微复杂一些的机器人。本文中的机器人,是一部由三只电机驱动的六足仿生昆虫机器人,电机增加了一只,难度一下子提高了好几倍。 一,仿生昆虫机器人 由三只电机驱动的步行机器人有两种常见的结构。 一种是著名的HEXAPOD,即昆虫机器人。在GOOGLE上搜索HEXAPOD可以找到很多机器人爱好者制作的风格各异的作品。我要制作的是一部简单的六足HEXAPOD,结构如图1所示。机器人的左前腿,左后腿及右前腿,右后腿通过拉杆连接,在左后和右后侧减速电机的驱动下做水平动作。左中腿和右中腿在腰部电机的驱动下做垂直动作。这部仿生昆虫机器人在爬行的时候,有着类似生物昆虫一样的步态,总是保持三足着地,即通常所说的Tripod Gait(三脚架步态)。三角架步态可以确保机器人在运动时重心的平稳,不会摔倒。
图1 仿生昆虫的步态规划非常的灵活,我给仿生昆虫机器人制定了两种步态方案,如下表1和表2(顺、逆、停为三只电机的状态,根据机械结构的不同,电机方向的不同,状态也不尽相同)。表1是我实际使用的步态。 表1
表2
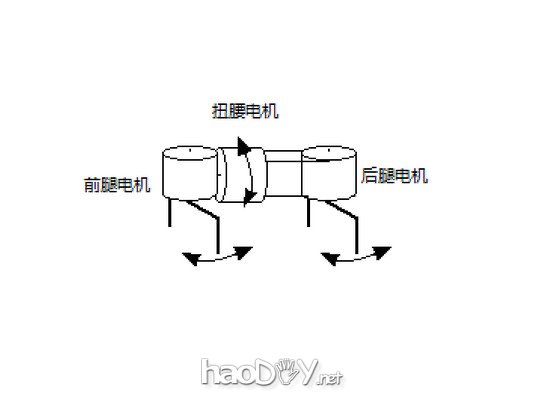
另一种是BEAM爬虫机器人,类似前一篇文章中所介绍的模拟爬虫,仍然是四足的结构。增加的一只电机安置在机器人的腰部,称为扭腰电机,用途是改善机器人的步态。结构见图2。
图2 二,制作昆虫机器人的骨架 所需材料:
|