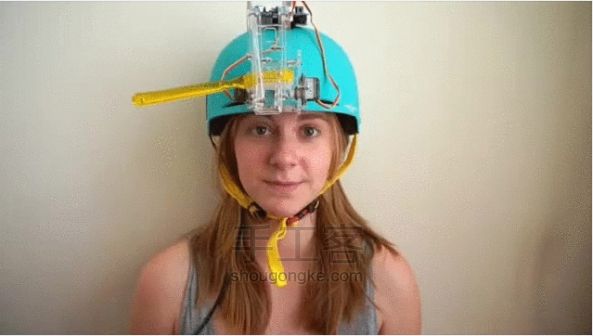
懒人必备法宝---刷牙机
时间:2017-11-05 20:13来源:未知 作者:admin 点击:
次
几周之前,我教小孩子做了一个刷牙机,因为我本身也很喜欢做机器人这类的东西,正好可以借这次课程做一个。我在Reddit上提过,之后很多人留言想要这个教程,所以我就写了这篇教程,现在我们就开始吧! 原作: simsalapim 译者:ljos 主要材料 : MeArm的机器

几周之前,我教小孩子做了一个刷牙机,因为我本身也很喜欢做机器人这类的东西,正好可以借这次课程做一个。我在Reddit上提过,之后很多人留言想要这个教程,所以我就写了这篇教程,现在我们就开始吧!
原作: simsalapim
译者:ljos
主要材料
:
|
MeArm的机器手臂 |
玩滑板用的头盔,这个很便宜 |
|
Arduino UNO |
SainSmart 的舵机罩 |
|
你喜欢的牙刷 |
所需工具
:
制作步骤
:
-
第1步:
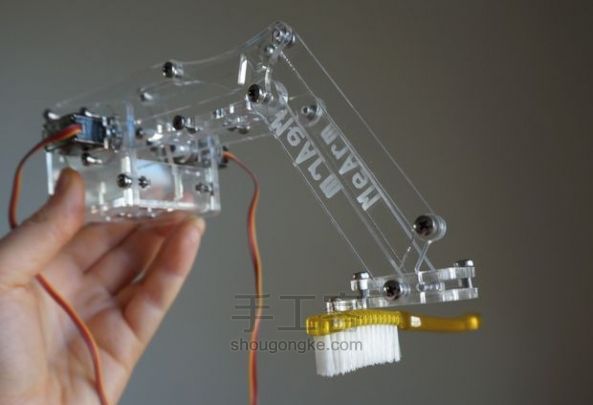
组装机械手臂
我先组装了机械手臂,大家按照MeArm的教程来组装就行。
我安装的时候省略了步骤2,3,即组装底座的步骤。也省略了步骤18,19,20,没安装机器臂的手爪。
-
第2步:

-
第3步:

-
第4步:

-
第5步:

-
第6步:

-
第7步:

-
第8步:
-
第9步:
在机器手臂的末端,我没安装手爪,安了牙刷。安牙刷的时候,我反复试验了很多次,才找到一个好方法。(我没用多余的零件,因为我很懒。。)
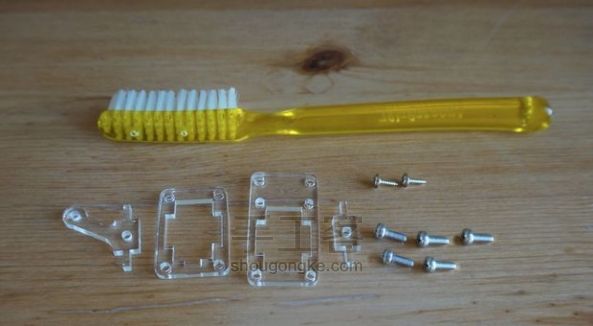
安装牙刷的时候,我用了图一所示的零件,这是机器手臂剩下的套件。
我从剩下的套件里挑了一个最大的零件,在牙刷头上钻两个洞,和零件上最上面的两个孔对上,然后用尖头螺丝固定就可以了。
用两个螺丝将如图所示的其他两个零件固定到最大的零件上。确保最大的零件是背向牙刷的。然后用剩下的三个螺丝等将它们都固定在机器手臂上。
-
第10步:
-
第11步:

-
第12步:

-
第13步:

-
第14步:

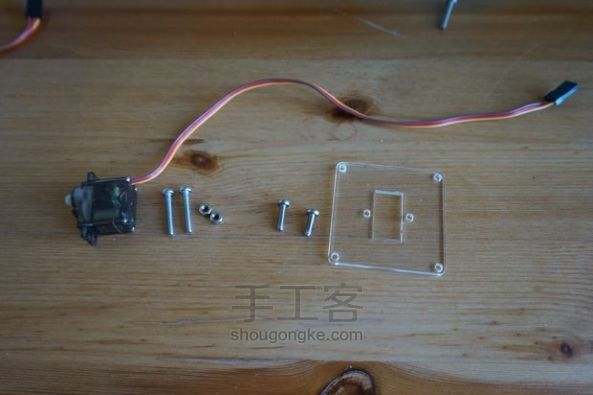
在头盔的正面钻一个舵机马达大小的洞。我先用钻孔机沿着舵机马达的轮廓钻了一个洞,然后用刀把它弄掉。
之后。我在机器手臂剩的套件中找了一个零件,如图所示,在头盔上钻4个洞,正好能和零件上的孔对齐就行。
现在安装舵机,安好之后,把零件安上。零件上面两个孔用长螺丝钉和螺栓固定,下面两个孔用短螺丝钉固定。螺丝钉的头要在头盔的里面,要不然它们就会妨碍机器手臂移动了。
-
第15步:
-
第16步:

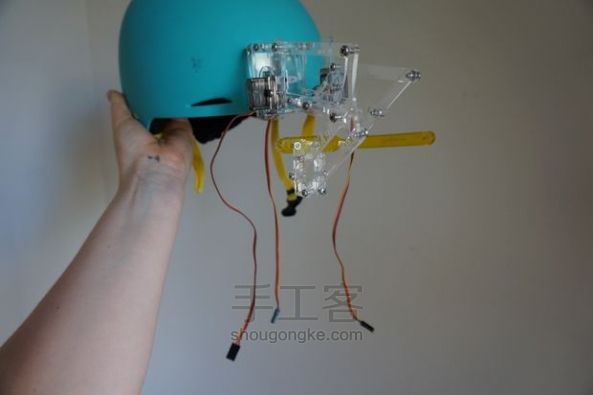
现在要安装机器手臂,安的时候,要保证机器手臂上的舵机摆臂安在头盔的舵机马达上。一定要保证机器手臂安好了,这样你才可以左右移动舵机马达。
用MeArm组件里面的小的黑色螺丝钉固定。
-
第17步:

-
第18步:

-
第19步:

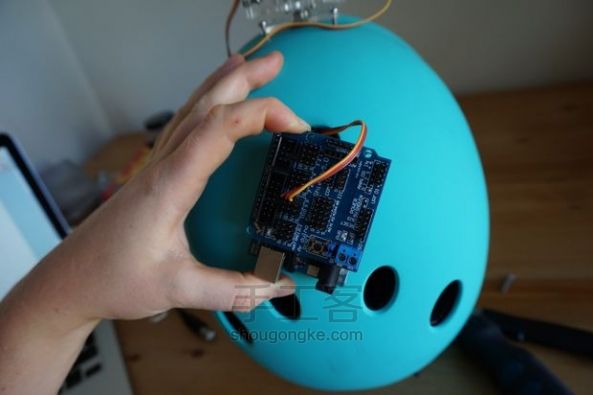
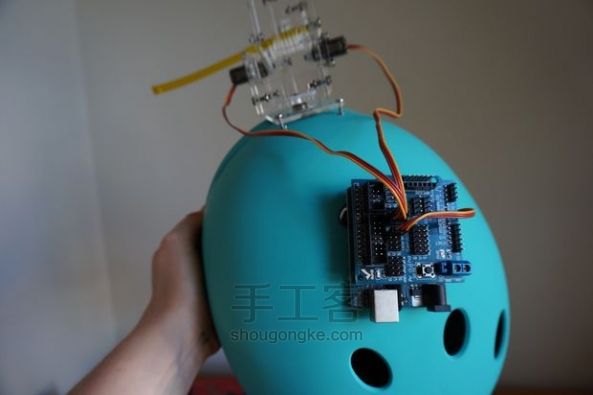
现在我要把Arduino安到头盔上了。如果你还没安呢,就将舵机罩安装到Arduino UNO上。
我拿了一根坏的头绳,放在Arduino和舵机罩之间,然后将头绳从头盔上的两个孔中穿进去。确保Arduino上USB口是朝向头盔的背面的。
-
第20步:
-
第21步:
将舵机马达上的线从绑住Arduino的那个孔中拉出来,将它连到舵机罩的引脚7上。然后将机器臂下臂连到引脚6上,上臂连到引脚8上。
编程
下面是我写的程序,你可以根据实际情况(比如你的脸的尺寸)来调整一下代码。
// Written by Simone Giertz
#include <Servo.h>
Servo servo[3];
// base, upper arm, lower arm
static const int servoPin[3] = {7,8,6};
void setup()
{
Serial.begin(9600);
for(int i=0; i<3; i++){
servo[i].attach(servoPin[i]);
}
// Fold the robot arm at the top of the helmet
servo[0].write(90); // base
servo[1].write(30); // upper arm
servo[2].write(150); // lower arm
}
void loop()
{
// Wait five seconds before we start the toothbrushing
delay(5000);
// Put the arm in brushing position
servo[1].write(180);
servo[0].write(90);
servo[2].write(70);
delay(1000);
// brush back and forth
for(int i = 0; i<10; i++){
servo[2].write(60);
delay(200);
servo[2].write(120);
delay(200);
}
// Fold the robot arm back up
servo[0].write(90);
servo[1].write(30);
servo[2].write(150);
}
(责任编辑:admin) |
织梦二维码生成器
------分隔线----------------------------

 低成本DIY空调 夏日纳凉神器
更新:2017-11-05
低成本DIY空调 夏日纳凉神器
更新:2017-11-05
 电动滑板制作教程 &arduino
更新:2017-06-20
电动滑板制作教程 &arduino
更新:2017-06-20
 废旧集成块DIY霸气外漏、独一无
更新:2017-06-06
废旧集成块DIY霸气外漏、独一无
更新:2017-06-06
 固态磁力搅拌器制作(附电路+源
更新:2017-05-27
固态磁力搅拌器制作(附电路+源
更新:2017-05-27









