
把两根导线的另一端分别焊接到PH2.0插座的两根引脚上。 第47步: 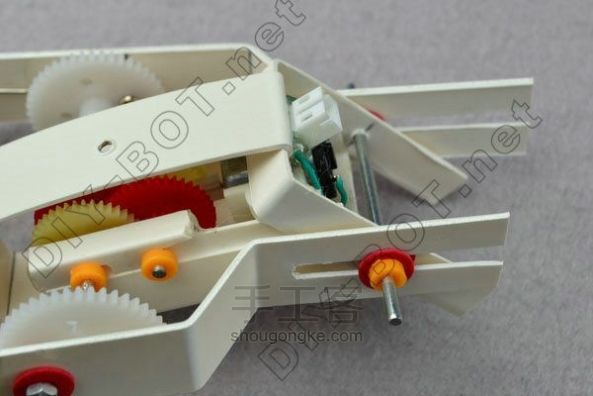
如图所示,把PH插座放置到凹形支架与电机之间的空隙中。 第48步: 
最后完成电路接口的组装。 第49步: 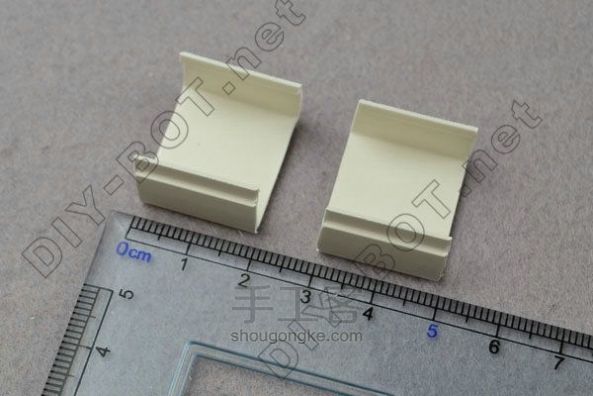
头部—— 第50步: 
把其中一段线槽凹槽部分往一侧压,使得它往边上倾斜。 第51步: 
在该段线槽凹槽部分的前端(对应上一步图中的右侧),用铅笔画上倒梯形的标记线。 第52步: 
然后用剪刀沿着倒梯形标记线剪裁,有倒梯形这一面作为机器人的正脸。 第53步: 
把两块线槽凹槽部分叠加在一起。 第54步: 
脸面部分放置于头盖部分的内侧,其中脸面部分有倒梯形的一侧(正脸)与上面的头盖部分平齐(图中下部分),而脸面部分的另一端从头盖部分后端长出来一点,算是后脑勺。 第55步: 
脸面部分与头盖部分之间用502胶水固定在一起。 第56步: 
用镊子夹住红色的M3垫片,涂上502胶水后,粘贴在正脸在如图所以的位置上,作为机器人的一对大眼睛。 第57步: 
完成机器人的头部制作。 第58步: 
把做好的头部安装到减速箱做成的躯干上。 第59步: 
头部结构上的脸面部分的前后端正好夹住背部支架的顶端。 第60步: 
完成头部的安装。 第61步: 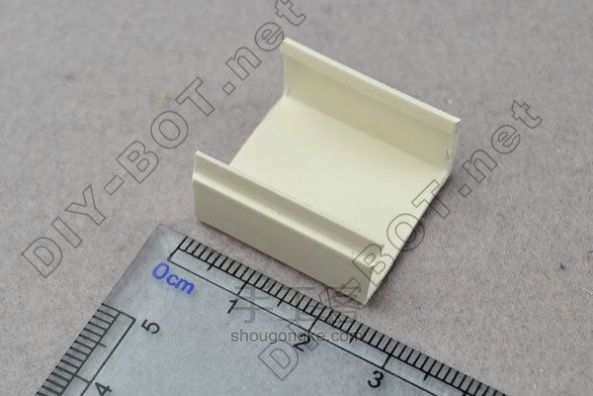
脚掌—— 第62步: 
在凹槽部分的背面,分别距离两侧边缘0.5cm的位置,用铅笔各画一条与两侧边缘平行的直线。 第63步: 
用剪刀沿着画好的直线把凹槽的两个侧边剪下来。 第64步: 
把原来凹槽侧边上的轨道剪掉,再如图所示把底面侧边剪开一个斜角,得到脚掌的结构。 第65步: 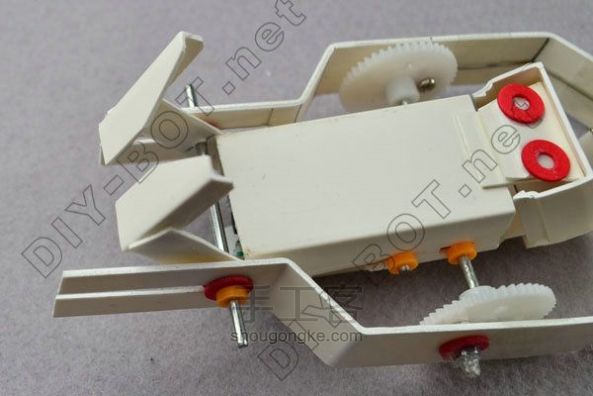
把脚掌的结构用502胶水粘贴在凹形支架的腿部前端。 第66步: 
第67步: 
整个肢体结构就基本成型了。 第68步: 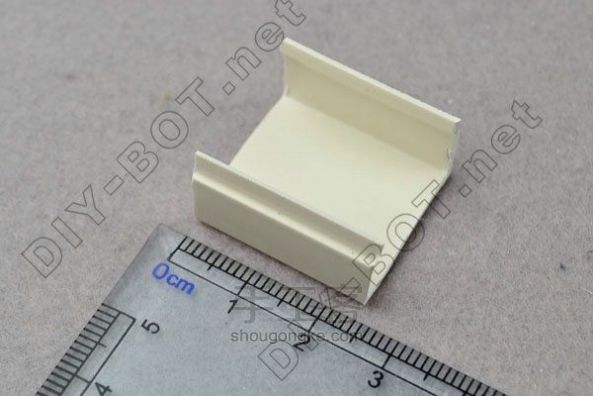
第69步: 
躯干—— 第70步: 
把槽盖上的轨道槽的一侧用美工刀倾斜着削去一段,得到一块颇具立体感的胸板结构。 第71步: 
把胸板结构用502胶水粘贴在机器人的前胸部位。 第72步: 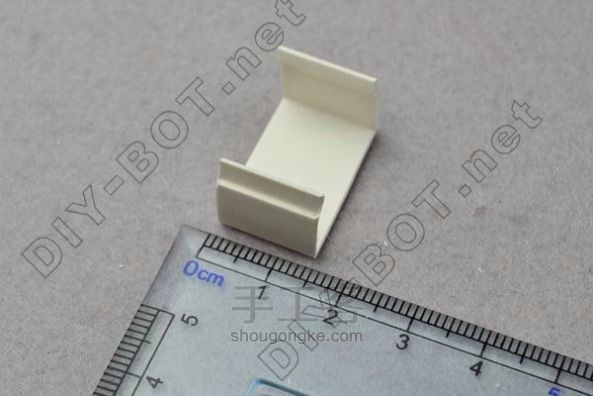
2-电源:支架—— 第73步: 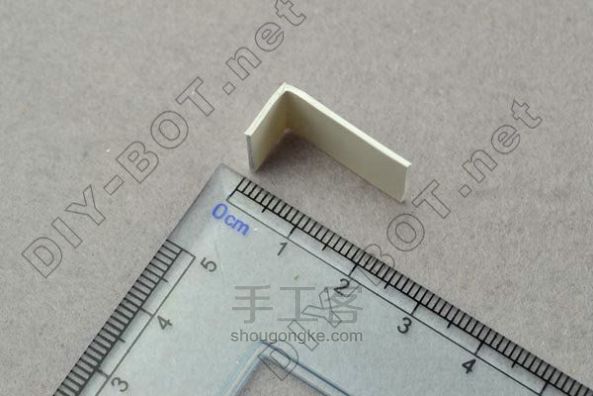
把上面得到的线槽凹槽的一个侧边剪掉,再把剩下的那个侧边上的轨道裁切掉,得到一根L形支架。 第74步: 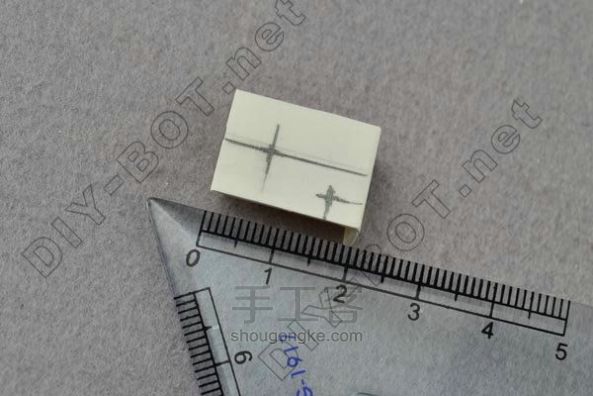
用铅笔在L形支架底部如图所示位置作好要钻孔的标记。 第75步: 
在L形支架的钻孔标记的位置钻好一大一小两个孔,其中小孔的直径2mm,大孔的直径3mm。 第76步: 
要求L形支架上的大孔可以同时穿过电池盒的两根导线。 第77步: 
用M2*6mm的平头螺丝/螺母把L形支架固定在电池盒的正极一端。 第78步: 
M2*6mm的平头螺丝可从电池盒正极的金属电极上的孔穿出,然后再串上L形支架,最后扭上螺母并拧紧。 第79步: 
开关—— 第80步: 
把电池盒在上一步被剪短的黑色导线,以及黑色导线被剪断得到的另一段,分别焊接到拨动开关的中间以及其中一个侧边的引脚上。 第81步: 
把拨动开关放置于L形支架的弯折角上,用热熔胶固定好。 第82步: 
导线—— 第83步: 
把红黑导线一并从L形支架的大孔中穿出。 第84步: 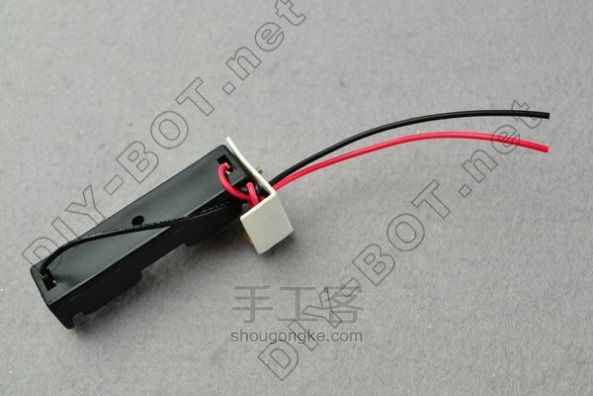
把红黑两根导线从L形支架引出的部分合在一起拉直,并且把引出的一端剪成一样的长度。 第85步: 
接口—— 第86步: 
把两个端子从原来固其上的金属条上拆下。 第87步: 
用烙铁直接给端子凹槽中央上锡,然后把电缆导线焊接到凹槽中。注意凹槽中央两侧有各有一段突起的弯折片,在焊接好导线后用尖嘴钳把两侧的弯折片按下凹槽内侧,让其夹住导线的焊接点。 第88步: 
再用尖嘴钳把端子后部两侧的突起也向内按下,夹住电缆的导线胶皮部分,这样相当于同时也让导线外皮也受力避免拉扯导致的导线断路。 第89步: 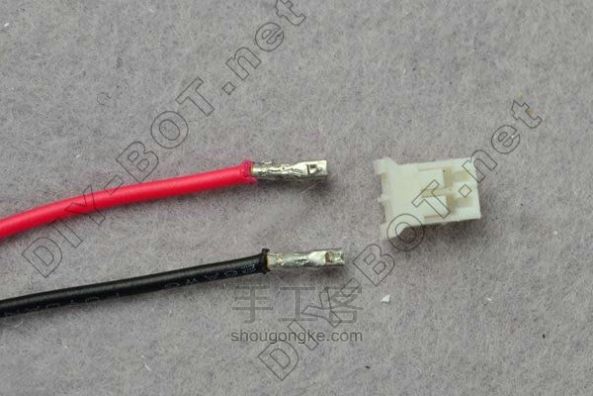
把连接好导线的端子如图所示插入到PH的塑料插头中,如下图所示放置端子的插入方向。 第90步: 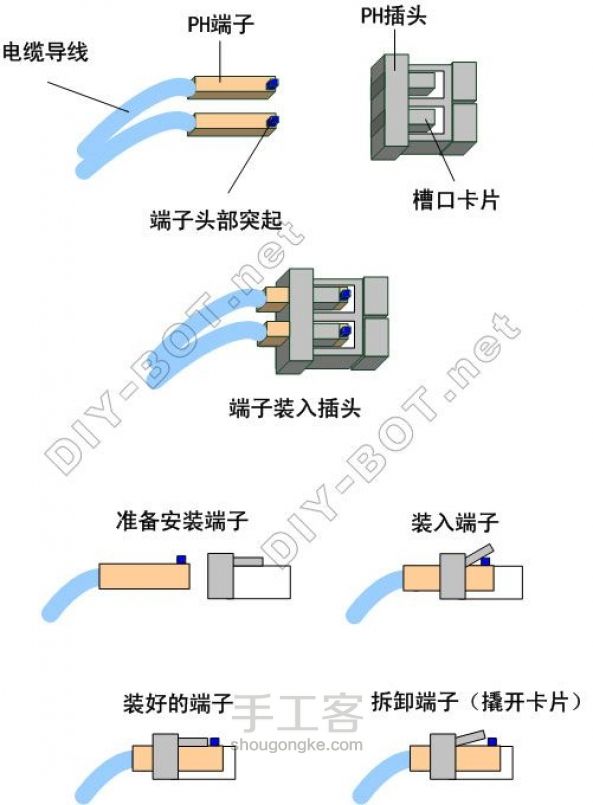
最后端子头部顶上有一个小突起可以卡住插头前端槽口上的卡片,让端子不至于会脱落。 第91步: 
第92步: 
完成的电源模块 第93步: 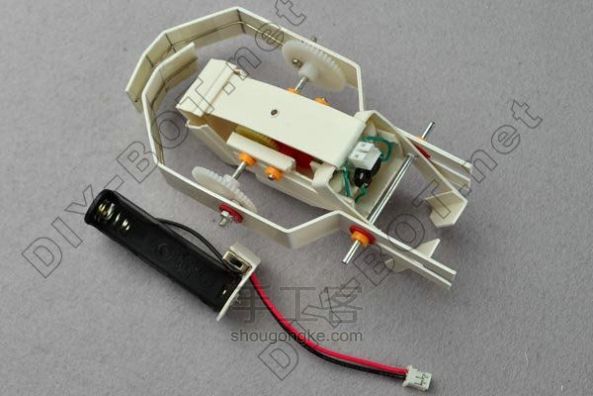
3-总装: 第94步: 
如图所示,把DC-7A电源模块放置于LT-12结构平台的背部。 第95步: 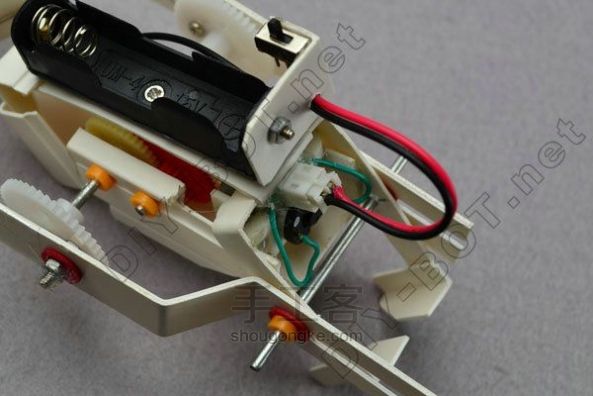
把DC-7A电源模块的PH插头插入LT-12结构平台的PH插座上。 第96步: 
完成整个吊绳攀爬机器人的制作。 (责任编辑:admin) |




![[普及贴] 作为科技迷,你必须要了解的乐高机器人常识!](/uploads/allimg/171105/1_110521222H234.jpg)



















