|
����ѵ���������Լ��?������ܿ��ڴ�ֱ��ǽ���Ͽ�?������Ҫ�ó羴���۹������ң���Ȼ�Ҿ��Ƿ����߱ڣ������еĿɰ�����Wallbots!��Ȼ��Ҳ���黳��ƺ��ҵ���������֩������
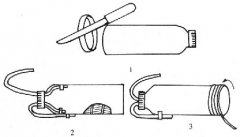
����ǽ����������ȥ��������?!ĪҪ�֣̿��Ȳ��DZڻ�Ҳ���DZ���֩�룬�����ǿɰ���Wallbots�������ڴ�ֱ��ò�ٰ촩Խ�Ĵ����ˡ���֪����ô����?�źߣ����¿���~СW�������κκ�����ǽ�����ƶ��������ݣ��װ壬���䡢�����š�СW���䱸�˼����������ͨ�����ǿ��Ծٰ���ӵĽ����� 3��ģʽ�ɹ�ѡ��ͨ��������ٰ�ת������ɫ�ߵÿ죬�����ϰ���(Ʃ���˵��ֿ���СW���ֵܽ�����);��ɫ�ߵ����������ϰ�;��ɫ�ߵ�������������ʱ��ȫ���ơ� ����1 ���ĺ�ԭ��
������ һЩ����������Ӳ�� ������ ��Ե���� ������ �� ������ Ӳ��ֽ ������ ���� ������ �Ƚ�ǹ ������ �¼� ������ ��ǯ(���ߵ�˭��) ������ 2.2Kŷķ����*4 ������ 10Kŷķ���� ������ 100ŷķ���� ������ Arduino Mini(��Ƭ��) ������ �ŷ����*2 ������ ����Ƭ*6 ������ 1��RGB LED�� ������ 1�����͵ĵ�� ����2 ʹ�ŷ����������ת֮����ƪ
������ ���ο����Ŀ��Ӵ���ÿ���ŷ����������ľ��ܻ�����DZ�Ҫ�ij������������˿����ӡ�
������ �ѹ��϶����Ŀ��Ӽ�����������λ�ƾ���һ��õ������źš� ������ �����ɫ�IJ�������������ת��180�Ⱥ���Ƶģ�����û?������ɫ����СƬ����
������ ȡ�³��� ������ ����ɫ�����ϵ�����(��һ����㱨����ô�����ͷ�����)��
������ �ѵ��ų���������С����Ƭ�������� 3 ʹ�ŷ������������֮����ƪ
������ �˿̣���λ���ѱ��ֳɵ�Ϸ~(�R���Q)/~����һ���������źš� ������ �Ӻڿ����ϼ�����ɫ����ɫ�ͻ�ɫ����(����õ�����һ����������)��
������ ��ɫ���ߺͻ�ɫ��֮�亸��2.2K�ĵ��� ������ �ڳ�ɫ�ͻ�ɫ����֮��Ҳ����2.2K�ĵ��� ����4 ��������
������ �ڹ�ͨģ���ź��£��ŷ�����ת��һ��ƽ���ǹ�ͨ�ġ����ǶԳư�װ��СW�ϣ�����Ҫ��һ��������ô��?��Ӳ���������϶�������(����Ӳ�����ģ��������Ǵ������ˣ�ˤ!)�� ������ ���µ������������ϵij�ɫ����ɫ���ߡ� ������ ���Ӻ��ߵ����ߣ�Ȼ�����ߵ�����(ͷ���˰�?��ʵ������ͼ����������һ��)�� ����5 ��װ��� ������ �ⲽ������!��Ҳ������ΰ��������ŷ����������Ȼ��ѳ���װ��á�Ȼ�����Ҽ��˵��������Ŀ��ӾͲ��Ǻ��ˣ��������þ�Ե���������Dz���һ����ġ� ����6 ��������
������ ��ô����ȥ��?���õ��Ƚ�����ʵ�κ�ճ��ǿ�������������ʹ���ȼ�����1Ӣ�糤��Ӳ�ߡ�
������ ��ÿ�������Ƚ�ճ���ŷ��������ij��������Ҫ�룬¶һ�����!
������ ��ÿ���ߵĽ�βճ3�����̡�����Ҳ������������! ����7 �ŷ����뵥Ƭ���Խ�
������ ����PIN 9�� PIN 10����������� ������ Pin 9 >�ŷ���1�ij��ߡ� ������ Pin 10 >�ŷ���2�ij��� ������ Ground >�ŷ���1,2�ĺ��ߡ� ������ VCC >�ŷ���1��2�ĺ��ߡ�8 �ӹ�������
������ ��ÿ����������(�����)������Arduino�ϣ�һ��4�������������ҡ�ǰ����
������ ÿ��������ĵ�·ͼ�����У���������һ����������VCC;��һ��������10K��100ŷķ�ĵ����ϡ�10K����ӵأ�100ŷķ������������ˡ�ÿ��������������(����)����MINI�ϵ�ģ�¶˿�(A0,A1,A2,A3)��
������ �Ҵ�ʩ�����������õģ�Analog 0 > �����Ĵ�����;Analog 1 > ��ߵĴ�����;Analog 2 > ǰ��Ĵ�����;Analog 3 > �ұߵĴ������� ����9 ����RGB LED��
������ ��ÿ����������(�����)������Arduino�ϣ�һ��4�������������ҡ�ǰ���� ������ ���Dz�������ÿ���˿ں�LED��֮��Ÿ�����(200 ŷķ����)?��û�н��ϣ������ҵ�LED�ƿ������ܵĵ�ѹ��Arduino���ṩ�ĸߵö࣬���Dz��ᱻ�ա� ����10 ��װ��� ������ ��ʵ�����ṩ3��4V�ĵ�ض������ã�Խ��Խ�á�����ʹ��sparkfun﮵�ء��ӵأ�Ȼ���ѹֱ�ӽ�Arduino��VCC�ڡ� ����11 �ϴ�ʩ!! ������ ������ǹ���2���ŷ��������4�������������ֵ���ٰ�����������ģʽ���м�����Ϊ��������˵õ����� ������ɫ��죬��������(����������ⱻ��סʱ); ������ɫ�����٣���������(������ɫ����); ������ɫ������������Ͷ��ơ� ������ СW�������ֵܽ�����ͨ������������ǽ����Ϊ��������ת��ת��ǰ��;���ղ���ģʽ�ɾٰ���١� ������ �������Ĵ���������ס�߳�3�룬ȫ���������Զ�У�� ����12 ����СW�㱼
������ ��СW�������ѡ���֮ǰ����ȷ����ʩ���ܣ�Ȼ�����ֵܷ����ĸ��ŷ��������ĸ����ҡ�
������ ����СWҪ��ֱ��Ϊ������Խ��Խ�ð�!���õ�Ӳֽ�ǣ���ʵ��ֽ���������϶���ʹ��
������ �Ұ��ŷ������Ƚ����Ӳֽ���������������ǰ����£�Ȼ����Ӳֽ�Ǽӹ̡�Ϊ�����ȴ������ͳ�����������������ţ����������¼���Щ����СW�Ķ�����ʵ���ǡ���������һ��ֽ! ������ Ȼ����Ȼ��û��Ȼ���ˣ����������,���ȥ��! (���α༭��admin) |