|
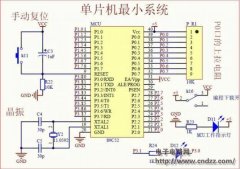
现在写个姊妹篇,《能巡线的NXT机器爬虫》,避障和巡线是机器人学习中两个经典项目,这两个项目用小车为载体的机器人看得比较多,但用爬虫为载体的机器人不常见。看看这只能巡线的NXT机器爬虫长啥样? 爬虫安装双光感传感器,有八只脚,沿着一条黑线巡行,如视频所示。 看看上面视频的后段,电机带动腿部摇动的画面,这个视频画面可以清楚地看到齿轮+连杆机构的爬行机理。 在爬虫行走之前,应该把同侧四条腿的相邻腿位置调整为180度相位差,左右两侧腿的相互位置没要求。初始位置如下图所示。 分配动力的齿轮机构图:
腿部连杆机构图:
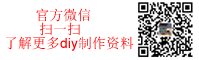
电机通过16个齿轮把动力等速分配到8个腿部连杆机构,腿部连杆机构带动金色脚丫,划出一段优美的曲线,8个脚相继完成蹬地、迈腿的动作,这样爬虫就“爬”起来了。 程序:
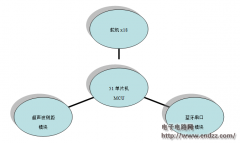
注意:这个程序不能照搬到你的双光感巡线项目,应该根据你的项目具体情况修改参数。 本作品源于五十川芳仁网站: 下面我提供些搭建图片:
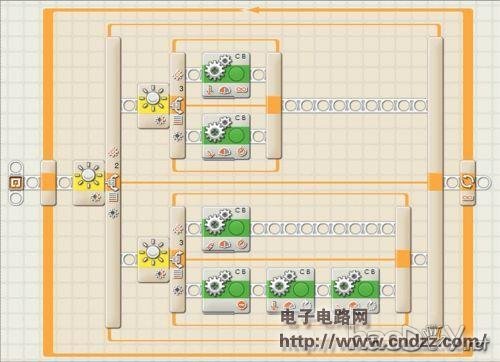
看了五十川芳仁和我提供的搭建图片,应该可以搭建出这只爬虫,但之前要看看是否有下图所示这些零件,数量够不够,没有的话,要买啊。
|
























![[视频] TDA2030A功放](/uploads/allimg/120909/1-120Z91620420-L.jpg)


