微型机器人制作diy系列-仿生龟(5)
时间:2013-02-21 12:27 来源:digi01.blog.163.com 作者:digi01 点击:次
电路部分较简单,用一小片洞洞板就可以焊起来,不再占过多篇幅描述。有几点需要注意的问题: 1, 电路和机械部分需要协调工作才能达到最佳效果。线路图中的光敏二极管、触须、电机这些对安装方位有要求的器件,一定要事先规划好。 2,用不透光材料包裹好光敏二极管,只使它的前部透光,我用的是黑色热缩管。两只光敏二极管需要呈一定夹角排列,形成机器龟的虚拟视野。光敏二极管周围尽量清空,方便以后调整夹角。如下图八。
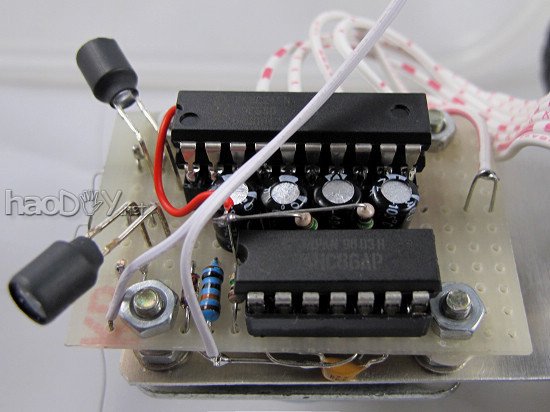
3,74HC245构成电机的双向驱动,需要根据电机的规格来叠加芯片,以获得足够的驱动电流。两片叠加起来,驱动桥每臂可以输出140ma的电流,足够驱动普通小型电机了。叠加的芯片最好焊接在一起,防止个别管脚接触不良导致电路工作不正常,使能跳线也可以直接焊接在芯片上,形成一个独立的功能模块。如下图九。
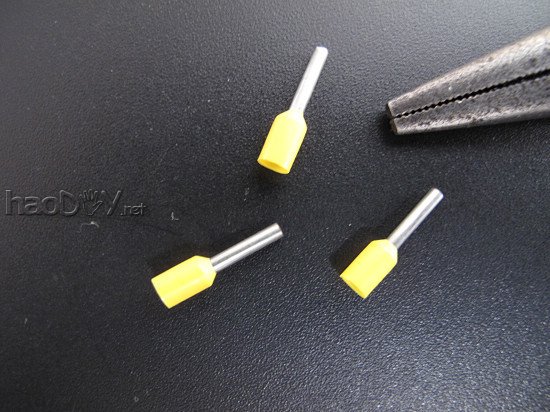
4, 触须开关的制作如下所述: 拆出工业冷压端子的铜芯,其实就是一个细铜管,读者也可以找其他适合的材料替代。见图十。
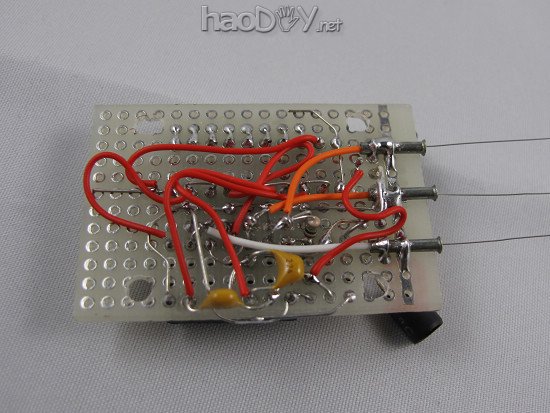
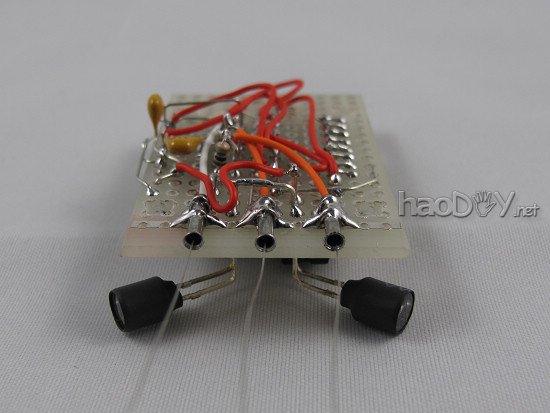
用细钢丝弯成触须,触须的末端,套一节绝缘管,插入细铜管里,再与相对应的电路节点连接。调节绝缘管与细铜管的配合,就可以微调这个开关的灵敏度。经过试验,我发现钢丝是无法焊接的,最后使用电线里面抽出的细铜丝把它捆绑在节点上,外面堆焊锡固定的方式,实际效果还可以。如图十一,图十二。
第三步、总体装配和调整 把电路部分装配在移动平台上,如下图十三、十四、十五、十六:
(责任编辑:admin) |