|
手工制作机器人之WIFI机器人 ――极客迷() 在经历了十多天的疯狂淘宝、组装、调试、拆卸、再组装、再调试的过程后,俺的Wifi Robot终于于2011年3月1日23:30竣工!!泪流满面!下面简单写写制作过程,也好给自己留个存档。
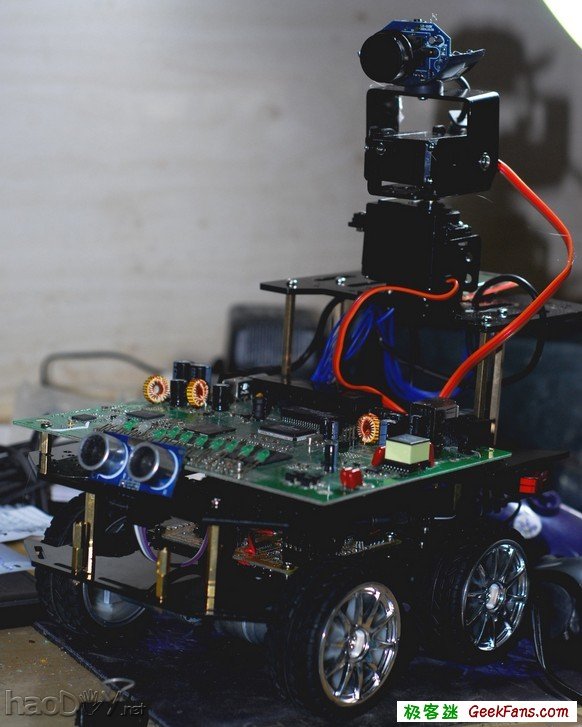
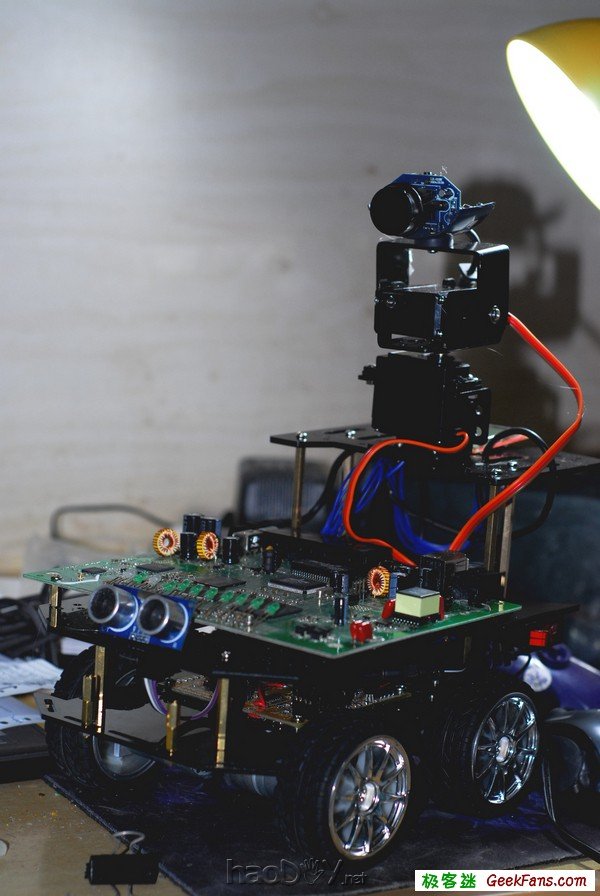
俺用的方案是igee论坛的wifi小车方案,驱动板与控制程序都是现成滴……不过现在发现吃现成的虽然方便,但是扩展功能却少得可怜。下一步打算买块arduino板自己研究一下重新组装小车,自己写写程序什么的。 Wifi Robot,顾名思义就是通过wifi无线网控制的机器人,比起普通的遥控车遥控机器人来,它的好处就是遥控信号覆盖范围可以做到很广,也可以通过互联网远程遥控,这样的话就可以派生出很多新的应用,比如视频监控等等。因为是新手初学,机器人的外形和功能上还比较粗糙,高手看到了不要笑话~ 1.准备工作 罗列一下零件清单: 亚克力车架×1:65元 igee小车驱动板带5110屏×1:150元 超声波传感器×1:40元 大亚DB120-B1无线路由×1:45元 301芯片摄像头×5:第一次买的一个10块,让我把线扯断了焊不上了,废弃。第二次买的一个10块,又坏了……第三次买了仨,每个5块。至今正常。合计35。 广角镜头×1:5.3元 辉盛M995舵机×2:70元 舵机云台支架×1:32元 步进马达套件×4:144元 12V4800mAh锂电池:87元 杜邦线螺丝螺帽等等配件若干…… 合计:673.3元 由于是第一次进行机器人制作,工具基本没有,光买电烙铁热熔胶枪电钻万用表就花了不少钱。加上乱七八糟的花销,总共1200+。一个多月的生活费没了…… 大家欣赏一下我的工作环境 寝室条件比较简陋……电脑画面为机器人控制界面
在买到亚克力车架和电钻之前我的小车一直使用个纸盒做车架的。纸盒虽然加工方便,但是太软,小车经常跑偏。而且由于轮距不合适,加装舵机云台之后由于载重增加导致转弯阻力太大,小车基本转不动了。 (责任编辑:admin) |