神马叫DIY 自己动手做数码相机(6)
时间:2013-01-31 23:13 来源:未知 作者:admin 点击:次
让我们估计一下每次写数据操作所能容许的时间耗费。在这个制作里,所有32K的SRAM都用来做数据缓冲器,而程序在16K的ethernet RAM上运行。数据缓冲器分成两半,其中一块填充数据的时候另一块将数据写入闪存。 这要求在每8毫秒里写入16KB的数据,每次操作必须在下次操作之前完成 。接下来的软件技巧可以解决这个问题。 数据写入过程中最重要的延迟发生在集群分配时,在实时操作系统里这是个很大的问题,集群分配导致的死时间视情况不同可能高达数秒钟。这个制作里使用集群预分配(写入数据时用f-lseek函数申请一个比目前需要大很多的空间)来避免写入数据时进入分区表重新定位。每次写入操作都包含一个用来结束操作的集群边界条件。想象一下SD卡里的文件预先整理出一块整齐的空间给数据,这就避免了写入数据过程中大量导致延迟的未知问题。 尽管有这些用来尽可能减小死时间的方法,SD卡或多或少还有一些内部处理时间。在挑选SD卡的时候需要挑写入速度尽可能快的SD卡。我在许多牌子之间做过比较,结果发现东芝产SD卡有最小的写入延迟,也有最稳定的表现。 3、显示图像
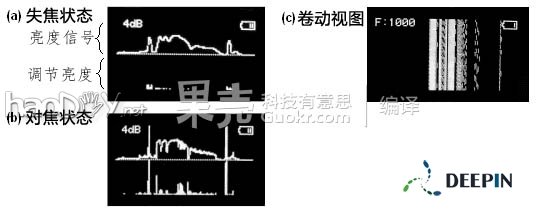
由于获得的图像数据都是一维的线条,它不能像传统平面成像的二维图像一样显示。为了这个问题需要一些特别的显示模式。 其中一种是范围视图,输入的图像信号连接到Y轴,就像像示波器的输入。Y轴信号表示亮度,X轴信号表示各点在线性传感器上的位置。这个模式适于用来观察感光度和聚焦情况。不同点之间数据的差距可以用来帮助对焦,当图像聚焦时,波形图上产生许多峰谷,出现最大的峰峰值表明焦距已经对上。这是现在数码相机里自动对焦功能的原型。 另外一种是卷动视图,图像向上卷动,新扫描到的图像出现在屏幕底部。这个模式能够用来调整线分辨率。最后生成的二维图像的高宽比决定于线分辨率和物体移动的速度。卷动视图能够展现出捕捉到的2D景象,但是如果被摄物体不移动就只剩下水平的线了,所以相机或者物体之一一定要在给定的运动速度下拍摄,这样才能一边观察一边调节线分辨率。 四、使用说明 线性扫描相机的一般用途同胶片时代的狭缝相机类似。狭缝相机很容易在性能上击败线性扫描相机,它的感光颗粒直径14um,远远小于CCD中单元的直径,意味着极好的分辨率。但是玩狭缝相机意味着你要足够的取景,对焦,拍摄和冲印能力,非老鸟不能为。 (责任编辑:admin) |