ΚΟΝΥΘ§ΥΒΝΥ’βΟ¥ΕύΘ§¥ΥΩΧΨΆΩΣ ΦΫχ»κΫΧ≥ΧΓΘ
“Μ”≤ΦΰΉιΉΑ
1 –Γ≥Β––ΈΣ≤ΩΟ≈
¥ΥΆΦ «Έ“ ΠΒήΉιΉΑΚΟΒΡΘ§«κΗς»ΥΉςΈΣ≤ΈΩΦ
ΦΌ»γΡψ¬ρΒΡ «œ÷≥…ΒΡΒΉ≈ΧΘ§Ρ«ΨΆΚΆΈ“ΒΡ“Μ―υΝΥΘ§ΉιΉΑΤδ Β «ΟΜ…ΕΩ…ΥΒΒΡΘ§Α―ΒγΜζάΈΩΩ…œ»ΞΨΆ «Θ§≤ΜΩ…ΘΩ±πΕώΉςΨγΝΥΘ§–ΓΟ≈…ζ≥« –ΒΡΘΓ÷Ν”Ύœκ±Ψ…μΉωΒΉ≈ΧΒΡΘ§Έ“œκΥΒΘ§“ΣΗψΦα’ξΒψΘ§‘έ’β¥ΈΒΡ–Γ≥Β¬μΝΠ «ΚήΉψΒΡΘ§”…”Ύ”–ΒγΜζ«ΐΕ·Θ§ΥΌ¬ ΫœΝΩΩλΘ®≤Μ¥χΦθΥΌ≥ί¬÷ΒΡΒΉ≈Χ±Ί»Μ“ΣΨ·ΧηΘ§ΥΌ¬ Κή «ΒΡΩλΘ©Θ§ΚσΨΔ“≤ΉψΘ§≤ΜΨ·ΧηΉ≤«ΫΚή’ΐ≥ΘΘ§“‘ ««ΖΚΟΒΡΒΉ≈ΧΨΆΒΟΨ·ΧηΝΥΘΓ
ΆΦΘΚ
3
ΖβΉΑΆΦΘΚ
«ΐΕ·–ΨΤ§”κΒγΜζΒΡΫ”Ζ®ΘΚ
άΐΘΚΉσ±Ώ«ΑΚσ¬÷ΘΚ
”“±ΏΒΡΚΆΉσ±ΏΒΡΫ”Ζ® «Άξ»Ϊ“Μ―υΒΡ
ΘΚ
Έ“ΒΡ–Γ≥ΒΆΦΘΚ
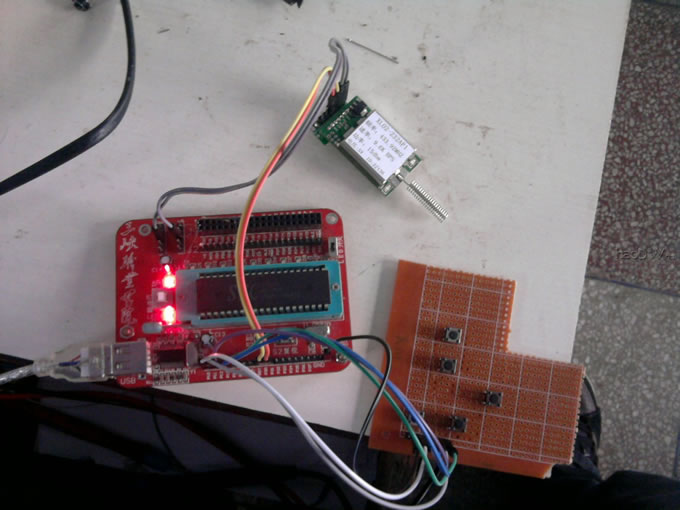
’β÷÷ΒγΜζ «ΦθΥΌΒΡΘ§“‘ «≤ΜΜαΚήΩλΘ§ΦΌ»γ «÷±Ϋ”ΒγΜζΖΔΕ·ΒΡ¬÷Ή”Θ§‘Ό”Ο12VΒγ‘¥ΒΡΜΑΘ§Ρ«ΥΌ¬ ΨΆΚή «ΩλΝΥΘ§ΡΘΩιΒΡ δ≥ω÷±Ϋ”≈ΰΝ§ΒγΜζΒγ‘¥œΏΘ§ δ≥ωΑ¥’’±ξΚ≈ΜρΑ¥’’¥κ ©Ϋ”»κΒΫΒΞΤ§Μζ…œ
ΒΞΤ§ΜζΒΡΫ”œΏΘΚ
»γΆΦΘΚ
’β «Έ“ΒΡΉν–ΓΧεœΒΑεΘ§Υυ”–“ΐ≥ω
ΈόœΏΡΘΩιΫ≤ΫβΘΚ
ΉιΉΑΚΟ÷°ΚσΒΡΆΦΘΚ
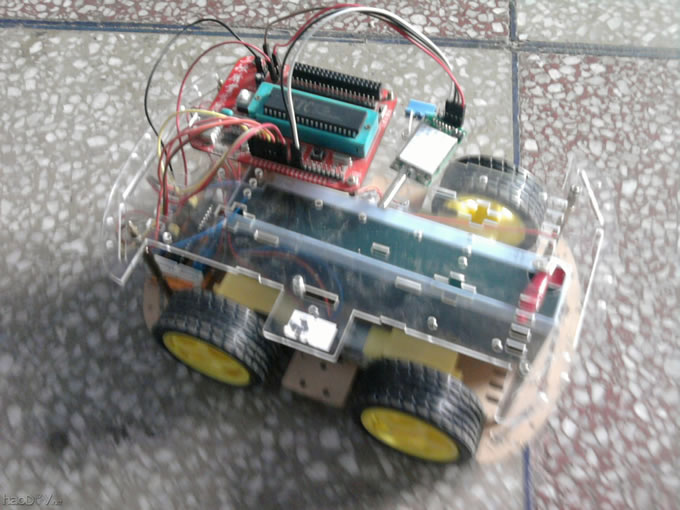
Έ“”Ο «12v–νΒγ≥ΊΘ§Ϋ”ΒΫ«ΐΕ·ΡΘΩιΚσΘ§ΡΘΩιΒΡ5V δ≥ω”÷Ω…“‘÷±Ϋ”ΗχΈόœΏΡΘΩιΚΆΉν–ΓΧεœΒ≤ΩΟ≈Ι©ΒγΓΘΙΧ»ΜΩ¥Τπά¥ΫœΝΩ¥÷±ΩΘ§Ω… «12VΒΡΒγ‘¥Θ§”κ“Μ―υΤΫ≥ΘΒΡ–Γ≥Β‘ΎΥΌ¬ ΚΆΡΆΝΠ…œΘ§ΕΦ”–ΝΥ±Ψ÷ ΒΡΫχ≤ΫΘΓ
“ΘΩΊ≤ΩΟ≈ΘΚ
œ¬Οφ «ΒάάμΆΦΚΆhex¥ζ¬κΘ§ΆυΚσ¥κ ©Έ“Μα÷±Ϋ”Ι“‘ΎΆχ“≥…œΘ§Ζ¬’φΧαΙ©16Ϋχ÷ΤΈΡΦΰ
ΒάάμΖ¬’φ.zip
‘≠Φΰ«εΒΞ.xls
‘¥¥ζ¬κΘΚ
;Έϋ»Γ¥κ ©
ORG 0 ;¥κ ©Τπ ΦΒΊΒψ
SJMP STAR ;ΧχΉΣΒΫ÷ς¥κ ©
ORG 30H ;¥°ΩΎΦδΕœΒΊΒψ
sjmp loop ;ΧχΉΣΒΫΦδΕœ¥Π ¬¥κ ©
STAR:
MOV SP,#5FH ;≈δ÷Ο≤÷Ωβ
MOV SCON,#50H ;¥°–– ΐΨίΟϊΡΩΘ®œξ«ι«κ≤ΈΩΦ51 ÷≤αΘ©
MOV TMOD,#20H ;Α¥ ±Τς ¬±δΖΫΖ®Θ®«κ≤ΈΩΦ51 ÷≤αΘ©
MOV PCON,#0 ;≤®ΧΊ¬ ≤Μ±ΕΥΌΘ®«κ≤ΈΩΦ51 ÷≤αΘ©
MOV TH1,#0fdH ;≈δ÷Ο≤®ΧΊ¬ ‘Ύ9600
MOV TL1,#0fdH ;≈δ÷Ο≤®ΧΊ¬ ‘Ύ9600
SETB EA ;ΩΣΤπΦδΕœ
clr ET1 ;ΖβΥχΑ¥ ±1ΦδΕœ
SETB ES ;ΩΣΤπ¥°ΩΎΦδΕœ
SETB TR1 ;ΤτΕ·Α¥ ±Τς1
mov a,#0 ;
mov p1,a ;≈δ÷Ο≥θ Φ÷ΒΘ§Φ¥ΩΣΜζp1 δ≥ω00h–Γ≥Β≤ΜΨΌ¥κ
main:
mov p1,a ;Α―a÷ΒΗχp1ΕΥΩΎ
sjmp main ;Έό«ν¬÷ΜΊmain¥κ ©
LOOP:
jnb ri,$ ;≈–Ε®Έϋ»ΓΈΜ «ΖώΈϋ»ΓΆξ
clr ri ;Έϋ»ΓΆξΚσ«εΩ’Έϋ»ΓΈΜ
mov a,sbuf ;ΖΔΥΆΒΡ ΐΨίΗχa
reti ;ΖΒΜΊΚσΘ§aΒΡ÷ΒΨΆΜαΗχp1
END
;ΖΔΥΆ¥κ ©
ORG 0 ;¥κ ©Τπ ΦΒΊΒψ
SJMP START ;ΧχΉΣΒΫ÷ς¥κ ©
ORG 30H ;¥°ΩΎΦδΕœΒΊΒψ
START:
MOV SP,#5FH ;≈δ÷Ο≤÷Ωβ
MOV TMOD,#20H ;Α¥ ±Τς ¬±δΖΫΖ®Θ®«κ≤ΈΩΦ51 ÷≤αΘ©
MOV PCON,#0 ;≤®ΧΊ¬ ≤Μ±ΕΥΌΘ®«κ≤ΈΩΦ51 ÷≤αΘ©
MOV SCON,#50H ;¥°–– ΐΨίΟϊΡΩΘ®œξ«ι«κ≤ΈΩΦ51 ÷≤αΘ©
MOV TH1,#0fdH ;≈δ÷Ο≤®ΧΊ¬ ‘Ύ9600
MOV TL1,#0fdH
setb EA ;ΩΣΤπΦδΕœ
clr ET1 ;ΖβΥχΑ¥ ±1ΦδΕœ
setb ES ;ΩΣΤπ¥°ΩΎΦδΕœ
SETB TR1 ;ΤτΕ·Α¥ ±Τς1
main:
lcall kcs ;≈≤”ΟΑ¥Φϋ…®Οη¥κ ©
jnz key ;”–ΦϋΑ¥œ¬‘ρΧχΉΣΒΫkey¥κ ©ΕΈ
sjmp main ;Έό«ν¬÷ΜΊmain¥κ ©
kcs:
mov p1,#0ffh ;p1Ηχ≥θ÷Β
mov a,p1 ;p1ΒΡ ΐ÷ΒΗχa
cpl a ;»ΓΖ¥a
anl a,#0ffh ;”κ‘ΥΥψ
ret
key:
lcall delay ;»μΦΰ―” ±¥κ ©Θ§Α¥Φϋ»ΞΕΕ
jb acc.0,send1
jb acc.1,send2
jb acc.2,send3
jb acc.3,send4
jb acc.4,send5
ret
DELAY:
MOV R5,#20
D1:MOV R6,#10
D2:MOV R7,#100
DJNZ R7,$
DJNZ R6,D2
DJNZ R5,D1
ret
send1:
mov r1,#10101010b ;ΧαΗΏ÷ΗΝν
sjmp send
send2:
mov r1,#01010101b ;ΆΥ»¥÷ΗΝν
sjmp send
send3:
mov r1,#01011010b ;ΉσΉΣ÷ΗΝν
sjmp send
send4:
mov r1,#10100101b ;”“ΉΣ÷ΗΝν
sjmp send
send5:
mov r1,#00h ;Ετ÷Τ÷ΗΝν
sjmp send
send:
MOV SBUF,r1 ;÷ΗΝνΗχsbuf
JNB TI,$ ;≈–Ε® «ΖώΖΔΥΆΆξ
reti ;ΦδΕœΖΒΜΊ
END
-

-
ΩΤΦΦ÷«Ρή―≠ΦΘ―ΑΦΘΜζΤς»Υ–Γ≥Β ΒγΉ”diy÷ΤΉςΧΉΦΰ ΦθΥΌΒγΜζΒΉ≈Χ¬÷Ή”
(‘π»Έ±ύΦ≠ΘΚadmin) |